什么是自动驾驶四要素?感定规控
- 2026-06-26 02:35:30

一、感知模块:环境信息的实时获取与处理
1. 功能定义与核心任务
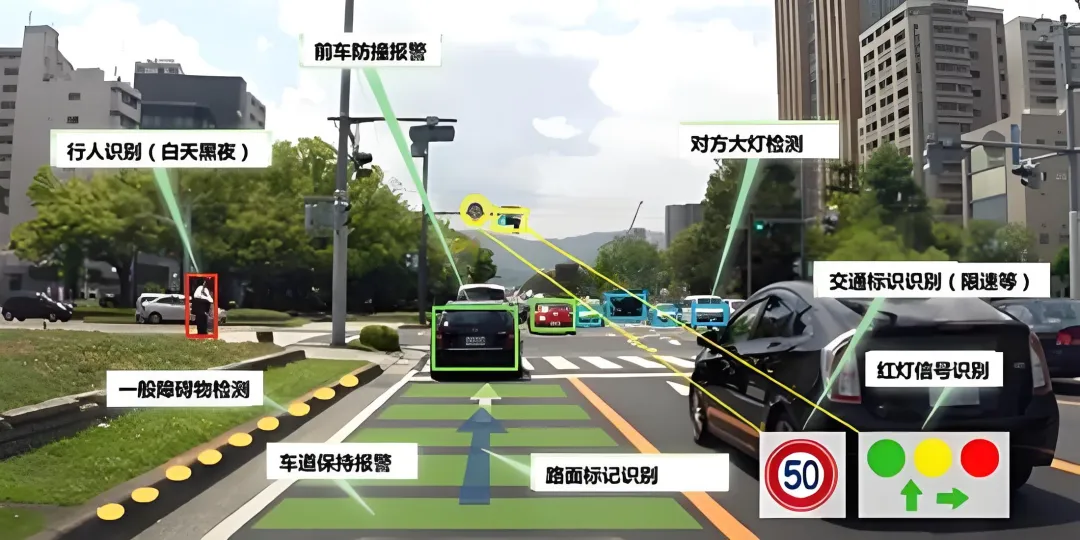
感知模块是智能驾驶系统的“感官”,负责通过传感器实时捕捉车辆周围环境信息,包括道路结构、障碍物、交通标志、行人等。其核心任务包括:
目标检测与分类:识别车辆、行人、自行车等动态障碍物。
语义分割:区分道路、车道线、路肩、绿化带等静态元素。
运动状态估计:计算目标物体的速度、加速度及运动轨迹。
多传感器融合:整合不同传感器数据,提升感知精度与鲁棒性。
2. 技术路线与传感器配置
2.1 主流传感器类型及特性
2.2 多传感器融合策略
前融合(Early Fusion):在原始数据层进行融合,如将激光雷达点云与摄像头图像像素级对齐。
技术实现:标定传感器外参(旋转矩阵与平移向量),应用卡尔曼滤波或深度学习模型(如PointPainting)进行数据关联。
优势:保留原始信息完整性,提升小目标检测能力。
后融合(Late Fusion):各传感器独立处理数据后,在目标级进行融合。
技术实现:匈牙利算法匹配不同传感器的检测结果,加权投票确定最终目标属性。
优势:计算资源需求低,容错性强。
2.3 深度学习在感知中的应用
目标检测模型:
Two-Stage模型:Faster R-CNN通过区域建议网络(RPN)生成候选框,再分类与回归。
One-Stage模型:YOLO(You Only Look Once)直接输出目标位置与类别,实时性更优。
语义分割模型:
U-Net:编码器-解码器结构,跳跃连接保留细节信息,适用于道路分割。
DeepLab系列:采用空洞卷积扩大感受野,精准识别复杂场景。
多任务学习:
MTL(Multi-Task Learning):共享骨干网络,并行输出检测、分割、深度估计结果,提升计算效率。
3. 极端场景处理技术
恶劣天气补偿:
激光雷达:采用1550nm波长提升雨雾穿透性,点云滤波算法(如DBSCAN)去除噪声。
摄像头:HDR成像+去雾算法(如暗通道先验)增强图像质量。
动态遮挡应对:
轨迹预测:基于LSTM网络预测被遮挡物体的运动路径。
概率占据栅格:构建栅格地图并计算每个栅格的障碍物存在概率。

二、定位模块:高精度位置与姿态确定
1. 功能定义与精度要求
定位模块需实现:
绝对定位:车辆在地球坐标系中的经纬度(误差<10cm)。
相对定位:相对于车道、交通标志的局部位置(误差<5cm)。
姿态估计:航向角、俯仰角、横滚角(误差<0.1°)。
2. 技术路线与核心算法
2.1 多源定位技术融合
2.2 高精度定位算法
卡尔曼滤波(KF/EKF):
线性卡尔曼滤波:适用于高斯线性系统,融合GNSS与IMU数据。
扩展卡尔曼滤波(EKF):处理非线性系统,如车辆运动模型。
粒子滤波(PF):
用大量粒子表示概率分布,适用于多模态定位问题(如路口歧义)。
图优化(Graph Optimization):
因子图:将GNSS、IMU、视觉观测作为约束节点,批量优化位姿。
2.3 高精度地图匹配
地图特征:
语义图层:车道线、交通标志、红绿灯位置。
几何图层:道路曲率、坡度、高程。
匹配算法:
ICP(迭代最近点):激光雷达点云与地图点云配准。
NDT(正态分布变换):将地图表示为概率分布,提升匹配效率。
3. 典型挑战与解决方案
隧道/城市峡谷效应:
多传感器冗余:IMU+轮速+视觉里程计构成紧耦合系统。
预存地图辅助:通过激光SLAM提前构建隧道内地图。
动态环境干扰:
动态物体过滤:结合感知模块输出,移除移动障碍物对定位的影响。
三、规划模块:安全高效的路径生成
1. 功能层次划分
全局路径规划:
基于高精度地图,规划起点到终点的最优路线(考虑拥堵、限速、能耗)。
局部行为决策:
确定超车、跟车、换道等策略,符合交通规则与驾驶礼仪。
运动轨迹生成:
生成平滑、动力学可行的具体路径。
2. 技术路线与算法实现
2.1 全局路径规划
图搜索算法:
A*:启发式搜索,平衡效率与最优性,适合道路网络。
Dijkstra:保证最优解,但计算量较大。
机器学习方法:
强化学习(RL):通过仿真训练选择最小时间/能耗路径。
2.2 行为决策
有限状态机(FSM):
定义“跟车”、“换道”、“超车”等状态及转移条件。
博弈论模型:
预测其他交通参与者行为,求解纳什均衡策略。
深度学习:
LSTM+Attention:建模多车交互,输出决策概率分布。
2.3 轨迹生成
多项式曲线:
五次多项式:满足位置、速度、加速度连续性约束。
最优控制:
LQR(线性二次调节器):最小化跟踪误差与控制量。
采样优化:
*RRT(快速探索随机树)**:在复杂障碍环境中生成可行路径。
3. 场景化优化策略
高速巡航:
采用恒定速度模型,保持安全车距(时间间隔2-3秒)。
拥堵跟车:
IDM(智能驾驶员模型)调节加速度,减少急刹。
紧急避障:
TTC(碰撞时间)计算,触发最大减速度(>0.8g)。
四、控制模块:精准执行规划指令
1. 功能分解
纵向控制:调节油门与刹车,实现速度跟踪。
横向控制:控制转向角,保持路径跟踪精度。
横纵向协同:解决过弯速度与转向的耦合关系。
2. 控制算法与技术实现
2.1 经典控制方法
PID控制:
比例项(P):快速响应误差。
积分项(I):消除稳态误差。
微分项(D):抑制超调。
局限:参数调优困难,非线性系统适应性差。
2.2 现代控制理论
模型预测控制(MPC):
建立车辆动力学模型,滚动优化未来数步控制量。
优势:显式处理约束(如轮胎摩擦圆)。
滑模控制(SMC):
设计滑模面,强制系统状态沿预定轨迹运动。
特点:强鲁棒性,适合不确定扰动场景。
2.3 车辆动力学模型
自行车模型:
简化转向几何关系,适用于低速场景。
公式:δ=LR+K⋅eδ=RL+K⋅e其中,δ为前轮转角,L为轴距,R为转弯半径,e为横向误差,K为控制增益。
二自由度模型:
考虑横摆与侧向运动耦合,表达式:{m(v˙y+vxψ˙)=Fyf+FyrIzψ¨=lfFyf−lrFyr{m(v˙y+vxψ˙)=Fyf+FyrIzψ¨=lfFyf−lrFyrm为质量,vx,vyvx,vy为纵向/侧向速度,ψ为横摆角,Fyf,FyrFyf,Fyr为前/后轮侧向力。
3. 执行器接口与容错设计
线控系统:
线控转向(SBW):无机械连接,响应延迟<50ms。
线控制动(BBW):电信号触发液压/电机制动,建压时间<150ms。
冗余设计:
双ECU架构,主控制器失效时备用系统接管。
制动系统保留机械冗余(如电子+液压双回路)。
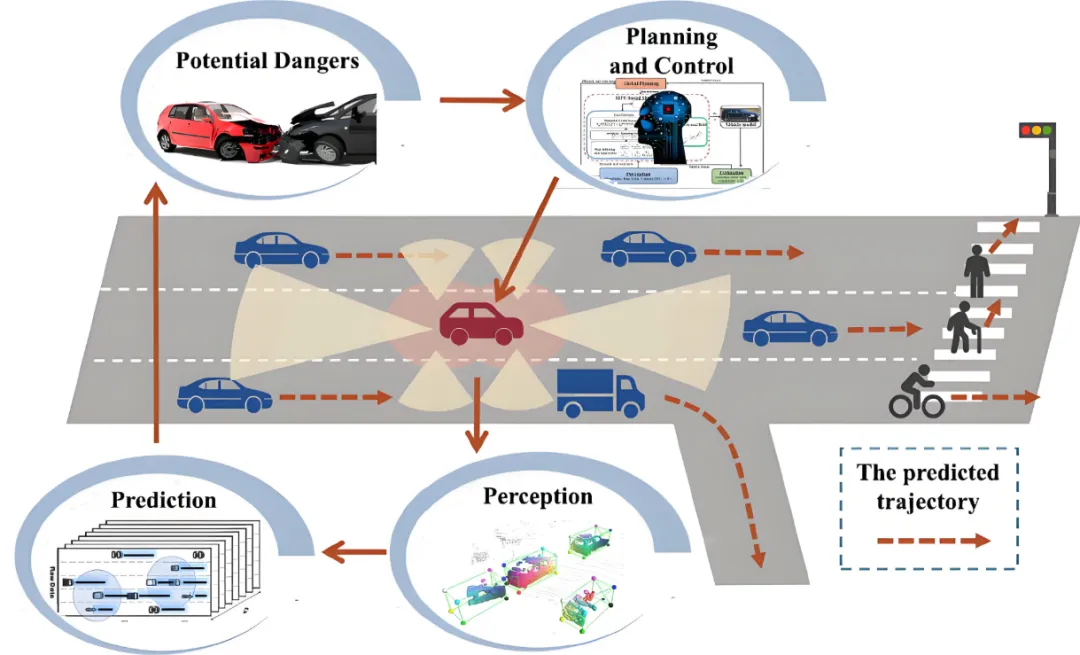
五、四大模块协同工作机制
1. 数据流与实时交互
感知→定位:提供动态障碍物位置,辅助定位模块排除干扰。
定位→规划:输出车辆位姿,作为路径规划的初始条件。
规划→控制:下发轨迹点序列(位置、速度、曲率)。
控制→感知/定位:反馈执行状态(如实际转向角),用于闭环校正。
2. 典型场景协同案例
2.1 城市道路行人避让
感知:摄像头检测到前方10米有行人横穿,激光雷达确认距离。
定位:结合高精地图,确定车辆处于人行道前50米。
规划:决策紧急制动,生成减速度曲线与绕行轨迹。
控制:线控制动系统触发最大减速度,同时微调转向避免碰撞。
2.2 高速公路自动变道
感知:毫米波雷达探测相邻车道后车距离120米,速度匹配。
定位:确认车辆处于高速中央车道,允许变道。
规划:计算最佳变道时机,生成五次多项式过渡轨迹。
控制:MPC控制器协调转向与油门,平滑完成变道。
3. 系统级挑战与优化方向
时序同步:各模块采用PTP(精确时间协议)对齐时间戳,误差<1ms。
资源分配:域控制器(如英伟达Orin)动态分配算力,确保实时性。
功能安全:ISO 26262 ASIL-D认证,单点故障覆盖率>99%。

六、技术发展趋势与行业展望
1. 感知:多模态融合与边缘计算
4D成像雷达:增加高度维度信息,分辨率提升至0.1°。
光子芯片激光雷达:固态化、低成本化(目标<$500)。
车载超算:算力向2000TOPS迈进,支持Transformer大模型部署。
2. 定位:众包建图与量子导航
Crowdsourcing HD Maps:通过量产车实时更新地图,鲜度<1小时。
量子惯性导航:基于冷原子干涉仪,定位精度厘米级/小时。
3. 规划:类脑决策与群体智能
神经符号系统:结合深度学习与知识推理,处理长尾场景。
V2X协同规划:车辆编队通行效率提升30%,能耗降低15%。
4. 控制:全驱全转向与预见性控制
轮毂电机:独立控制每个车轮扭矩,实现坦克转向。
云控平台:基于5G上传路况,提前调整控制参数
总而言之这四大技术形成一个紧密的闭环:
感知系统 实时扫描周围环境,识别出“前方50米有辆慢车”。
定位系统 同时确认“我正行驶在中间车道,位置精确到厘米”。
规划系统 接收到以上信息后,做出决策:“需要向左变道以超车”。随后,它计算出一条安全、平滑的变道轨迹。
线控系统 接收到变道轨迹指令,精确地控制转向、驱动和制动系统,协同完成变道动作。
在整个过程中,这个循环以极高的频率(每秒数十次)不断重复,确保车辆能够安全、平稳、智能地应对各种复杂的交通场景。