说实话,这些年我跑车展、试驾新车,被问得最多的一个问题就是:“老王啊,这自动驾驶到底靠不靠谱?它凭啥能看见前面的车和人?”
作为一个开了14年车的人,今天就跟大家不吹不黑地聊聊,自动驾驶到底是怎么”看路”的。

01. 一台车,凭什么能自己跑起来?
咱们先把这事掰开了说。一辆车说到底就是底盘、电池、驱动系统这套硬件,这些东西它老老实实在底下干活,没什么花头。
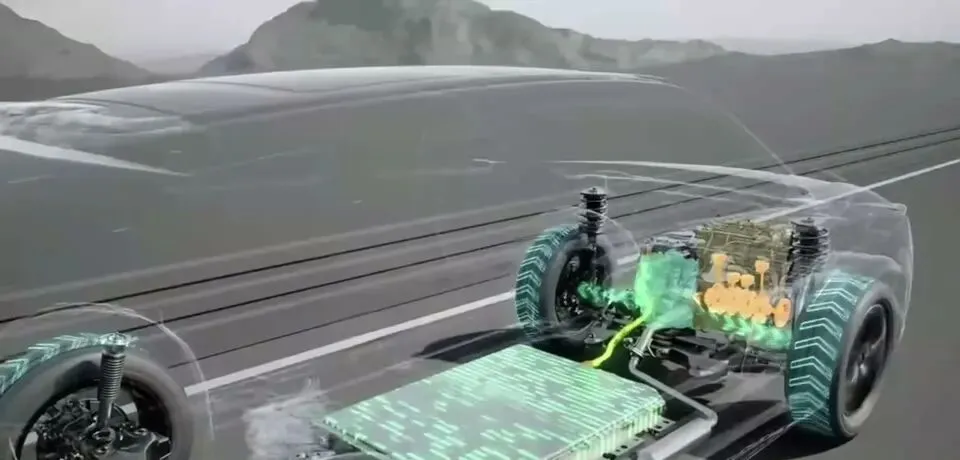
但是吧,真正让一台车变”聪明”的,是它头顶上那一圈摄像头、雷达,还有车里那颗”大脑”——AI芯片。
最早工程师们怎么搞自动驾驶的?说出来你可能不信,就是模仿人类。人怎么开车?靠眼睛看嘛。所以最初的方案就是给车装一堆摄像头,让它像人一样”看”路。

02. 这就延伸出一个问题:光”看见”够吗?
不得不承认,光有摄像头还不行。你想啊,一辆白色保时捷SUV停在那儿,AI怎么知道这是车不是墙?这就得靠海量的数据训练。

说句良心话,AI识别物体这事儿,跟咱们小时候认字一个道理——见多了自然就认得了。工程师喂给它几百万张图片:这是车、这是人、这是红绿灯、这是路边的电线杆……喂到最后,它一眼就能分辨出来。
话说回来,光认得还不够,还得知道这玩意儿离我多远。摄像头有个先天毛病——它不太擅长测距。你说一辆车在你前面,到底是50米还是80米?纯靠摄像头算,误差可不小。
03. 激光雷达登场,这点我是服气的
这就是为啥后来激光雷达(LiDAR)火起来了。
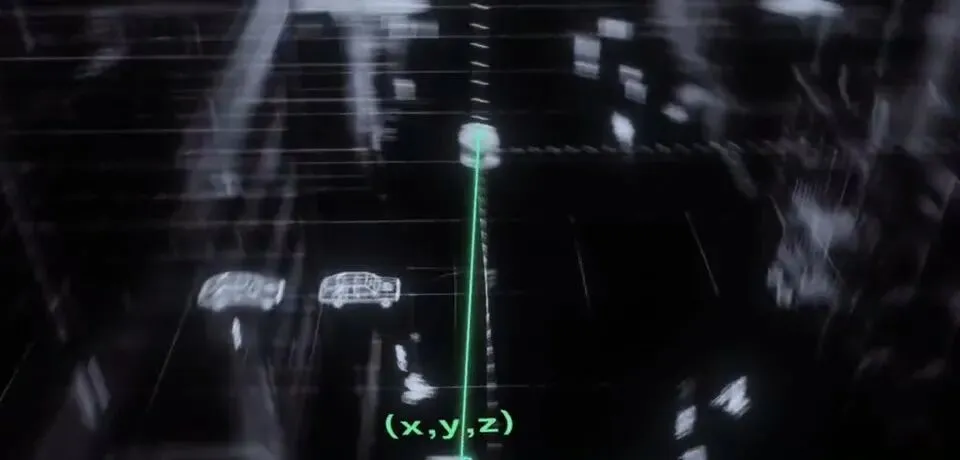
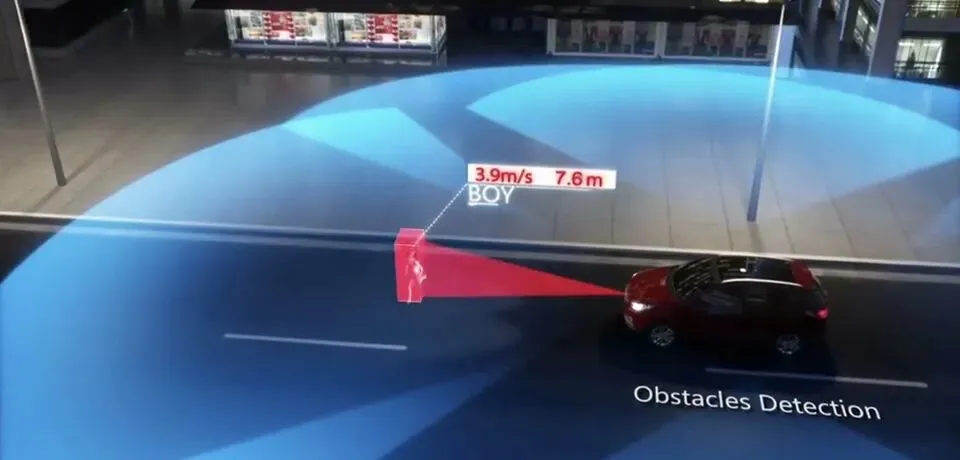
激光雷达的原理简单来说就是:往外打激光束,碰到东西反射回来,算一下时间,距离就出来了。这玩意儿测距精度真的是没谁了,几厘米的误差都能给你拿捏住。
把摄像头看到的画面,和激光雷达生成的点云图一融合——好家伙,车不光知道前面是辆车,还知道这辆车离我38.5米,正在以60码的速度过来。这就叫多传感器融合,目前主流车企走的就是这条路。
04. Transformer来了,AI开始有”上帝视角”
这个必须得说说。前两年AI圈子里炸了的Transformer模型,被工程师们搬到了自动驾驶上。

你说巧不巧,这模型一上车,效果直接起飞。以前的AI是”零件式”思维——看到一辆车、看到一个人、看到一条线,分开处理。Transformer不一样,它能给AI一个”上帝视角”,把整个路口、所有车辆行人、所有车道线,揉在一起理解。
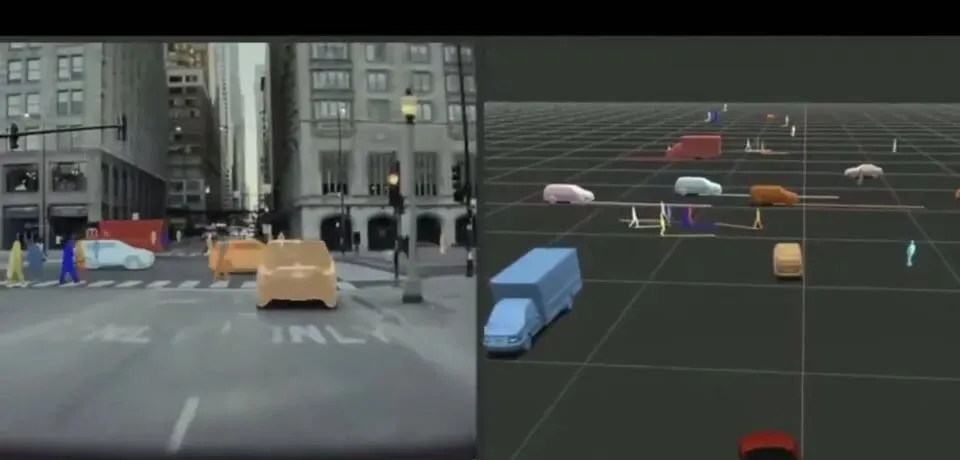
结果没想到,这种”全局视野”让车开起来越来越像老司机。前面有个塑料袋飘过来?它知道不用躲。旁边突然窜出个电动车?立马减速规避。这操作,跟一个开了十几年车的老师傅,还真有点像。

05. 纯视觉 VS 多传感器融合,到底选哪个?
那问题来了,现在行业里其实分成了两派。

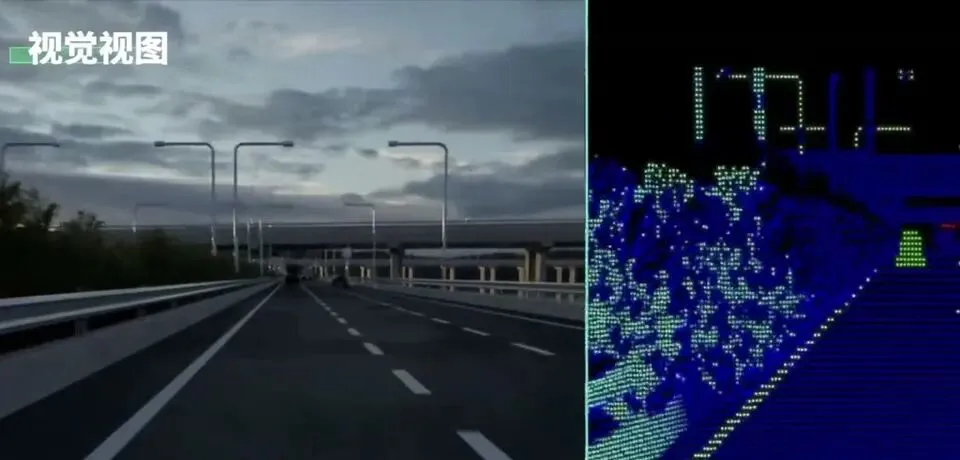
一派是纯视觉方案,代表选手你们都懂的,就靠摄像头硬刚。优点是成本低、数据闭环快,缺点也明显——夜里、大雨、逆光的时候,眼神不太好使。
另一派是多传感器融合,摄像头+激光雷达+毫米波雷达全上。优点是冗余高、安全性强,下雨下雪都不怵;缺点就是贵,激光雷达成本压不下来。
站在我一个奶爸的角度来说,带着老婆孩子出门,安全这事儿真不能省。我宁可多花点钱上多传感器方案,也不愿意把全家人的命交给几个摄像头。这就是我的实话。
06. 老王说两句
这些年我也算是看着自动驾驶一步步发展过来的。从最早只能在高速跟车,到现在能在城区自己变道超车,技术进步是真快。
但是说句良心话,再先进的辅助驾驶,目前也还是”辅助”两个字。手别离方向盘,眼别离前方,这是底线。别被厂家的宣传忽悠了,什么”解放双手”、“完全无人驾驶”,这波操作我是真没看懂——真要出事,最后扛责任的还是你自己。
简单来说就是:技术值得拥抱,但保持理性。新技术好,但得信靠谱的。
大家觉得呢?你们更看好纯视觉还是多传感器融合?欢迎车友们留言聊聊,当然,这只是我个人观点,可能每个人需求不一样。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
