在这些HESS电动车中,电池管理系统未被考虑。不过,增加了功率限制,以限制电池最大功率下车辆负载所需的功率。该机制确保电池在规定的最大电流下工作。因此,真实车辆的电池管理系统不会激活过压或过电流保护。采用制动电阻,当电池参考电流超过安全极限或制动模式下电池充满电时,电阻会激活。
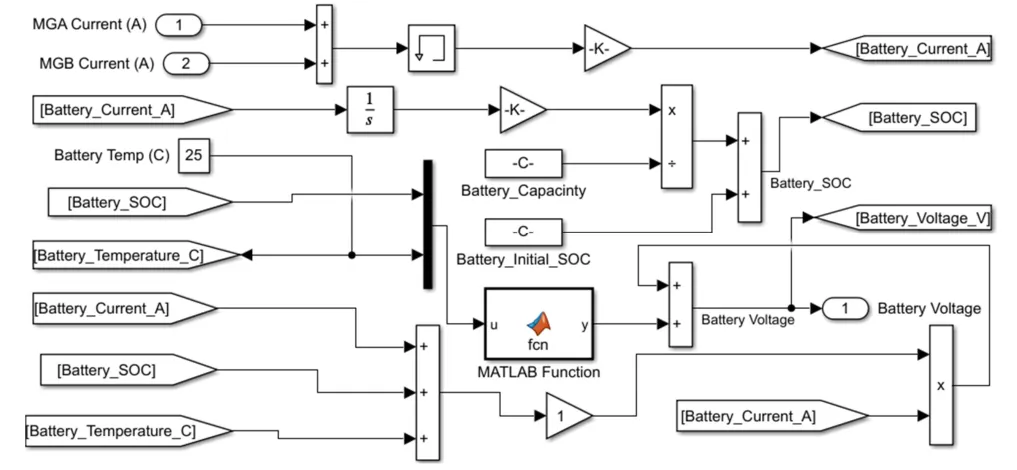
本研究采用了两种电池模型和SC模型,分别是HESS电动车厂的非线性和线性模型,以及在线优化。非线性模型分别使用MATLAB软件的通用电池模型和Stern-Tofel模型,分别用于电池和SC。电池和SC的线性模型为
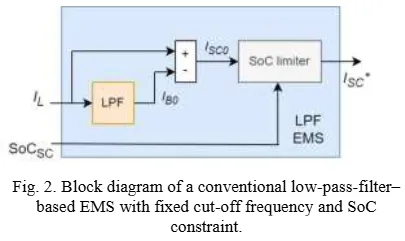
EMS对于在HESS EV中将负载功率分配到ESS各ESS至关重要。EMS技术已开发出多种;然而,其计算复杂性阻碍了某些方法的实现。实施LPF紧急医疗服务(LPF EMS)非常简单。此外,它可靠,能产生有利的动力学和环的减少效果[10]。低频与负载电流解耦并送入电池,是低频电源作为EMS运作的基本理念。其余信号同时以更高频率传输到SC。根据工作原理,它不能单独作为EMS运行。为了保持ESS在安全的SoC极限下运行,需要引入SoC限制器。图2展示了传统LPF电磁场的结构,其中我B0是低频负载电流输出,且我SC0是负载电流与低功率输出之间的差值,反映了直流-直流变换器在SC侧的位置。增加了SoC限制器,以保持SC工作在安全的SoC范围内。
大多数关于HESS电动化电磁场LPF的研究都侧重于寻找最优截止频率。另一种则增加了负载变化的自适应能力。低压电磁场的相位偏移效应导致了显著损耗,因为它导致了HESS中ESS不必要的电力交换。然而,只有少数关于LPF电磁系统的研究解决了这一问题。它采用RB方法来减少LPF电磁系统中的相位偏移效应。
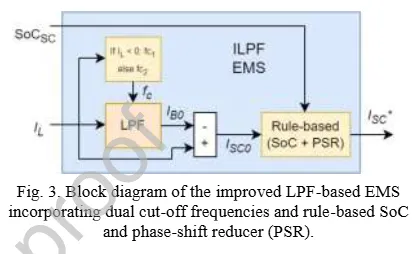
在我们之前的研究中,曾提出使用ILPF来解决LPF问题。相位移效应和SoC极限通过RB方法解决。负载变化通过截止频率切换来解决,该方法区分了动力和制动。截止频率是通过PSO优化过程得出的。ILPF结构如图3所示,其中使用PSO得到fC1以及fc2解决了截止频率的确定和适应性问题。相位抑制器(PSR)是 RB 方法中减少相位偏移效应的一部分。然而,优化过程是在离线进行的;因此,培训需要完整的车辆和赛道数据。
为克服ILPF方法的不足,本研究提出了SL-LPF方法。在ILPF方法中,需要一个全面的HESS EV模型来确定最优截止频率。然而,对于HESS电子服务仅能获得有限系统信息的实际场景,SL-LPF电磁系统被提出作为替代方案。
SL-LPF解决了LPF紧急医疗服务的四个关键挑战。虽然SL-LPF和ILPF的基本概念相似,但在截止频率确定和适应性方面存在差异。ILPF依赖完整的驱动循环数据进行训练过程,而SL-LPF则通过通过窗口采样收集的较短数据段实现相同目标。为了提升SL-LPF中在线优化的效率,优化过程中采用了电池和SC的简化线性模型。
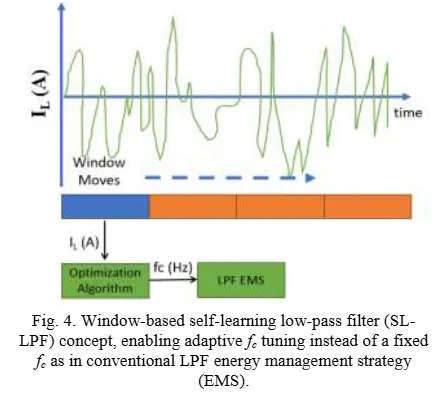
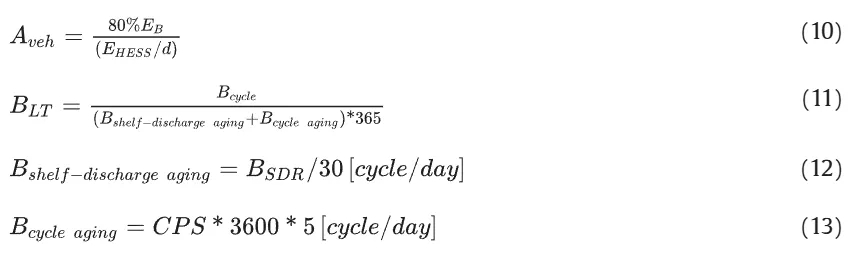
所提SL-LPF方法的工作原理如图4所示。该方法引入了基于窗口优化截止频率的在线学习机制。为了实现以最小数据需求实现实时适配,SL-LPF采用窗口化概念,即在预设时间窗口内收集负载电流。一旦窗口包含足够的样本(例如1500个样本,代表30秒),数据便被传递给优化算法。该算法随后确定了改善性能指标的最佳截止频率,该指标定义为总行程距离。系统会继续以先前优化的截止频率运行,直到下一个窗口完全填充。
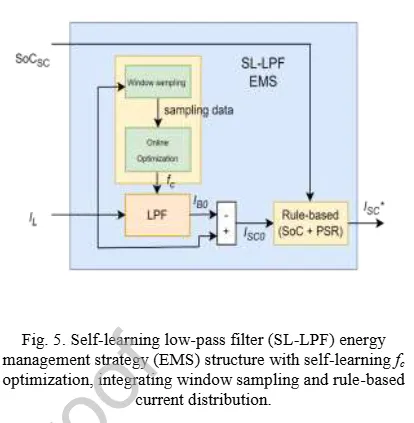
SL-LPF的整体结构见图5,突出展示了窗口采样机制与在线优化模块的集成。与图3所示的ILPF方法不同,后者通过全驾驶周期数据在离线时优化截止频率,SL-LPF仅使用短期采样数据进行实时更新,使其更实用且更具适应性。
SL-LPF方法的目标函数是最大化总行程距离(DT),即电动车在电池使用寿命内可行驶的总里程。定义为:
其中:
其中PB和 T 分别是电池功率和模拟时间。𝛩(𝑃𝐵(𝑡))表示考虑非负幂值的Heaviside阶梯函数。该优化过程的约束条件如下:
The SoCSC限制在55%至95%之间,以防止SC过载和过放电。根据Hussain等人的说法,SC电荷不得超过最大电压的50%。因此,该限值选择在安全裕度低于100%且高于50%的情况下。
在线优化算法的候选算法是梯度下降(GD)和PSO。这是因为GD和PSO相对轻量化,可以在低成本硬件上实时运行。此外,尽管目标函数(DT看起来线性,计算的底层过程涉及复杂的系统动力学,计算量极高。GD和PSO采用不同的方法。GD是一种确定性和局部优化方法,而PSO是一种受群体行为启发的随机全局优化方法。
GD 确定了最优fc通过计算目标函数相对于 的梯度fc.它会调整fc方向使目标函数约简。如果梯度大小减小,步长减小,这意味着在接近最小值时步长会减慢。该方法依赖梯度的方向和大小来获得最优fc.梯度的计算方法如下:
其中 m 和 Δfc分别是数据大小和截止频率阶。然后,速度(经过梯度累积)计算为:
其中vGD, α,β分别是速度系数、学习率系数和动量系数。衰减用于每次迭代后减少α,步长接近最小值时减缓,有助于实现稳定收敛。随后,截止频率通过以下方式更新和约束:
另一方面,PSO初始化一组随机值为fc穿越搜索空间。每个粒子评估目标函数,并跟踪单个和整个群体的最佳位置。粒子根据最佳位置调整它们的位置(Pbest)以及全局最佳位置(Gbest)在群体中。fc在所有粒子中,经过一定次数迭代后,选择最小目标函数作为输出。该位置的计算公式如下:
其中pi以及vi分别是粒子i的当前位置和速度。速度的计算方法如下:
其中w是惯性重,c1以及c2分别是认知权重和社会权重,且r1以及r2是 [0,1] 中的随机值。
图6展示了PSO和GD方法的在线优化流程图。为了降低计算负载并实现实时实现,每个窗口的迭代次数受到限制,且仅评估少量候选解(模拟)数量(每次迭代设为四个)。HESS EV仿真模型包含两种模型:一种是非线性ESS模型,代表HESS EV系统的实际电厂行为;另一种是线性化ESS模型,用于优化模块内以减少计算时间。
优化过程基于先前收集的窗口数据,而非当前实时输入,这使得它能够异步运行,计算开销较低。初始截止频率被设定为0.01 Hz,基于拉戈内图中的典型能量-功率特性。使用这种知情初始值可以增强收敛稳定性,因为随机初始化可能导致变慢或收敛不稳定,且迭代次数有限。GD和PSO优化器的调优参数,包括学习率、惯性权重和种群规模,分别汇总于表2、表3。
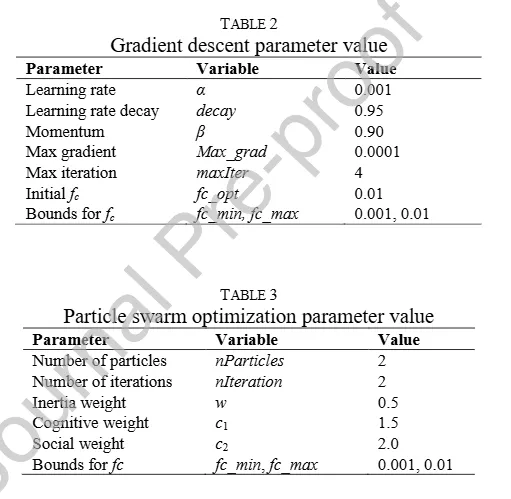
与LPF电磁系统配合使用的一种技术是FLC,用于提供自适应能力。多位研究人员已证明FLC能增强LPF EMS的性能。LPF使用模糊逻辑根据SoC和SC的负载电流调整截止频率。模拟分析显示该方法具有高效率、减少电池损耗和降低电压波动。Zhang 等人曾用于基于自适应滤波的电池和 SC EMS。他们认为,所建议的方法能够有效保护电池并减少能源消耗。对于配备燃料电池(FC)、电池和SC的电动汽车,Snoussi等人建议采用基于自适应滤波的EMS。LPF的截止频率是模糊输出,而负载电流和SC的SoC是其输入。他们通过模拟验证了这一方法,并得出结论:有可能以低成本提升自主性和耐久性。
本研究比较了所提SL-LPF的性能与基于先前研究的FLC-LPF。FLC的输入是SC SoC和负载电流,而输出为fc如图7所示,用于LPF EMS。SC SoC 的范围范围为 0% 至 100%,负载电流范围为 −127.5 A 至 127.5 A,fc在0.001 Hz和0.01 Hz之间。模糊语言变量定义如下:VL、L、M和H分别表示非常低、低、中和高;N、Z和P分别表示负、零和正。FLC规则列于表4。
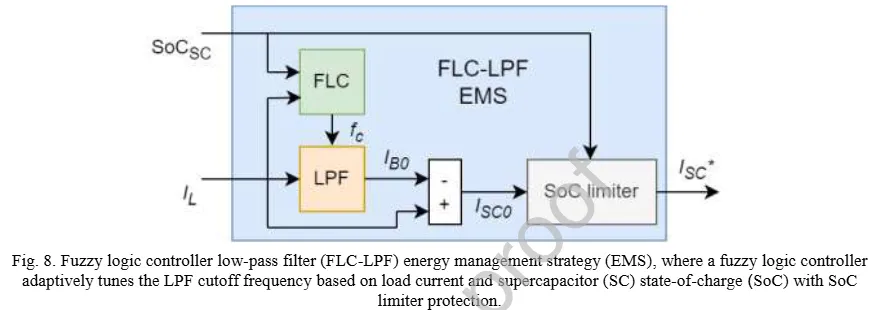
图8展示了FLC-LPF电磁系统(EMS)的结构。FLC接收负载电流(IL)和SC SoC作为输入,并生成截止频率(fc)作为其输出的LPF。作为额外的保障措施,还加入了SoC限制器,以保持SC SoC在可接受范围内。SC SoC 的限制设置为 55%−95%,与 SL-LPF 相同,方便进行公平对比。该 RB 系统的最终输出是 SC 的参考电流(ISC*).
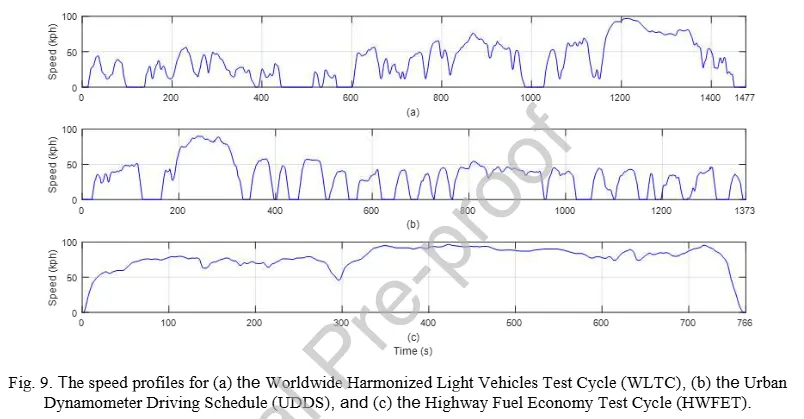
模拟测试验证了该方法的有效性。评估分为培训和验证两个阶段。训练阶段采用了全球协调轻型车辆测试周期(WLTC),因为它是电动车能耗和排放测量的广泛标准[34]。除了WLTC,验证阶段还涉及两个外部驱动周期:城市测功机驾驶计划(UDDS)和高速公路燃油经济测试周期(HWFET)。这些循环代表不同的驾驶条件:城市、乡村和高速公路。图9显示了WLTC、UDDS和HWFET的速度曲线,行驶距离分别为15.01公里、12.07公里和16.45公里。所有EMS方法均与两个基准比较:仅电池EV(基线)和FLC-LPF EMS。
测试赛道不包含海拔或坡度变化。初始SoC值设置为电池60%,SC为75%;这些数值分别被选在可接受的作区间20%–100%和55%–95%范围内。这些中等值反映了真实电动汽车应用的典型初始化场景。
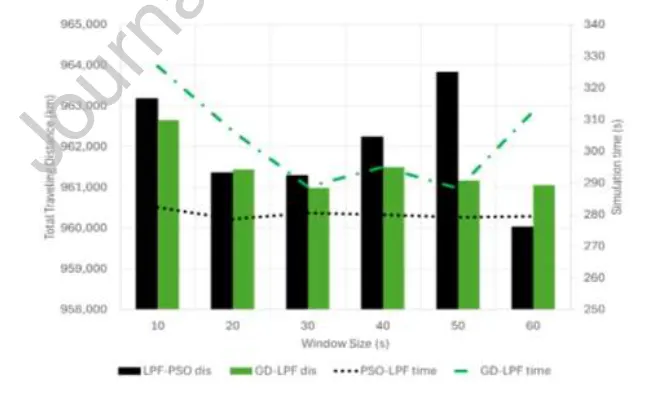
GD-LPF和PSO-LPF都需要参数调谐。为了降低计算复杂度,每个优化窗口的模拟次数被限制为四次。这种权衡平衡了性能与嵌入式硬件的可行性。窗口大小起着关键作用,因为它决定了截止频率更新的频率。采样时间为0.02秒,测试了多个窗口大小。
图10展示了优化性能如何随窗口大小变化。PSO-LPF在计算时间更短的情况下,始终能获得更高的目标函数值,而GD-LPF则更短。其最佳性能出现在50秒窗口,而GD-LPF在10秒窗口表现最佳。这种对比之所以出现,是因为
•GD依赖于局部梯度信息,这受益于频繁的细粒度更新(短窗口)。
•PSO采用随机全局搜索,当每次更新数据较多(窗口较长)时效果更好。
这些发现支持选择PSO作为SL-LPF优化核心的合理性,因为它在适应性和计算效率之间提供了更优越的平衡。
为量化这些改进,进行了使用WLTC驱动循环的比较分析,结果总结于表5。传统的低功率功率(LPF)方法(采用固定的0.01 Hz截止频率)相比纯电池系统带来边际增益。相比之下,ILPF、GD-LPF和PSO-LPF显著优于传统方法。PSO-LPF比传统LPF提升了最多5%的总行驶距离,并将与ILPF的性能差距缩小到仅0.186%。GD-LPF紧随其后,落后ILPF 0.309%。这些结果证实,尽管离线ILPF通过利用全周期数据实现了最高性能,但所提议的SL-LPF在提供实时适应性且仅需极少数据的情况下,几乎实现了相同的结果。
尽管有其优势,在线优化方法如GD-LPF和PSO-LPF的性能仍低于离线方法。这种差异是因为离线优化利用整个数据集,从而能够识别出全局最优方案。相比之下,在线优化过程仅利用每个抽样窗口内的数据,这通常导致局部最优。然而,在线方法带来了明显优势,比如无需详细系统模型即可运行,并能适应驱动周期的实时变化。基于这些观察,PSO-LPF成为在线LPF优化方法中最有效的,因此被称为SL-LPF。
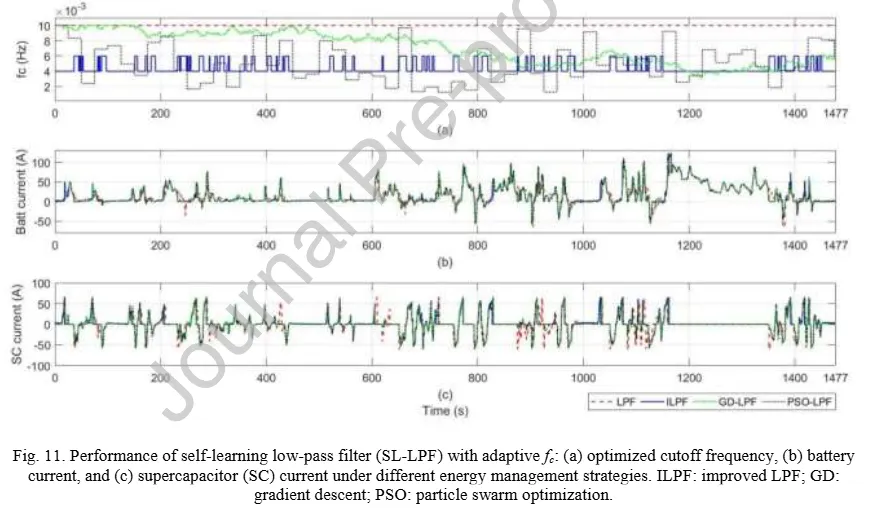
图11展示了所有方法的截止频率分布和电流行为。传统的低功率电力具有固定的截止频率,而ILPF则使用开关值进行供电和制动。PSO-LPF由于其随机全局搜索,表现出较大的波动,显示出其对不同驾驶段的适应能力。GD-LPF显示截止频率变化更为缓慢,反映了其基于梯度的更新。在相位移减少方面,使用PSR的方法,包括ILPF、PSO-LPF和GD-LPF,显示出更平滑的电池电流分布和更少的SC过度使用。具体来说,传统液压压会导致SC频繁的电放电循环,导致能量损失。这些趋势凸显了通过PSR实现相位偏移缓解直接提升效率的事实。
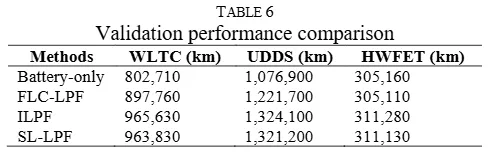
表6展示了以总行驶距离为主要比较指标的各行驶周期性能验证结果。结果显示,HESS在所有驾驶周期中均提升性能,包括城市驾驶(UDDS)、城市驾驶(WLTC)和高速公路驾驶(HWFET)。然而,由于高速路面处于稳态状态,加速和减速极少,性能提升效果较为明显,限制了SC的利用。
结果显示,ILPF在所有行驶周期中实现了最长的行驶距离,展示了优于其他方法的能量管理能力。仅电池模式始终导致最短的行驶距离,因为SC没有额外的能量支持。在WLTC循环中,ILPF相比仅电池模式显著提升了20.296%,而SL-LPF则实现了20.072%的提升,差距仅为0.186%。FLC-LPF提供11.841%的适度涨幅。在UDDS周期中,ILPF再次优于其他模式,提升22.955%,紧随其后的是SL-LPF,提升22.685%。 FLC-LPF带来了显著的13.446%的改善。对于HWFET循环,由于驾驶条件更稳定,两模式之间的性能差异较小。ILPF在SL-LPF中保持略微优势,相比单电池电能提升约2%。这些微小的差异证明了SL-LPF即使仅依赖在线优化,且没有完整的系统或驱动循环数据,仍能实现接近最佳的性能。与其他方法相比,FLC-LPF方法的性能较低。这表明,虽然使用带有模糊逻辑的自适应低功率滤波器(adaptive LPF)有一定优势,但若不解决相位偏移效应并确保调谐正确,就无法完全优化低速电磁场(LPF EMS)。
这些结果也支持了SL-LPF在实际电动汽车应用中的应用。虽然ILPF性能最佳,但离线优化需要完整的车辆和赛道数据。而SL-LPF则实现了相当的性能,但数据需求更少且灵活性更高。这使得SL-LPF非常适合系统模型和驱动模式尚未完全了解的实时HESS应用。
一个关键的实际问题是SL-LPF是否能部署在真实电动车上。每个优化步骤每个窗口只需四个模拟,保持低复杂度。在标准台式处理器上,更新频率为每10至50秒,这在现代汽车级微控制器(如ARM Cortex-M4/M7、STM32)的范围内。这表明SL-LPF可以在嵌入式硬件中实际实现,无需高性能处理器。未来工作将探索硬件在环和实时嵌入式验证,以进一步验证其可行性。