风靡各大车企的自动驾驶VLA大模型,为何华为没有选择?
- 2026-06-25 17:15:26
作者 | 刘延@知乎
链接 | https://www.zhihu.com/people/liu-yan-14-92
编辑 | 自动驾驶之心
本文只做学术分享,如有侵权,联系删文
>>自动驾驶前沿信息获取→自动驾驶之心知识星球
VLA不是唯一解,只是未来路线中的一种。
关于华为对VLA路线的看法,我的解释基本对应的上。
VLA的优点在于,在架构中增加了大模型,具备一定现实理解能力,是当下端到端技术探索的新路线
关于VLA,得先从原理说起。
VLA是把摄像头、激光雷达、毫米波雷达,甚至车外麦克风等信息和自车信息持续输入,问一个大模型如何开车。
如果你截一张行车记录仪的图,问DeepSeek应该如何开车,并让它只输出怎么开车,恭喜你,你获得了VLA的雏形。
有了这个雏形,再去做工程上的优化,终归是会大力出奇迹的。
端到端模式,依然存在数据的边际效应递减问题,以及Corner Case覆盖不够的问题。
当然,端到端模型最大的问题不是这些,而是模型的AI只知道相关性,而非因果性。此外,还有个灾难性遗忘的问题。
相较于目前的端到端,VLA架构中增加了LLM——也就是大模型,因此具备了对于现实世界更好的理解能力。
虽然大模型是否具备真正的理解能力还有争议,但相较于上面的端到端仅有相关性没有因果性的理解,大模型起码知道,红灯应该停。
大模型,特别是中小参数模型性能的飞速增长,意味着在VLA中的这个“L”的能力,也可以飞速增长。
但VLA的缺点在于,对于硬件的要求,模型能力的上限,都受到了约束。
以理想为例,VLA大体可以看做四步:
1)识别图像; 2)把图像信息和自车信息输入大模型(也就是Prefill) 3)大模型输出驾驶建议(也就是Decode) 4)将输出建议画成自车轨迹+环境,提供真正的驾驶建议。
所有内容,先变成语言对环境的描述,然后输入到一个(尺寸不算大)的大模型中,让这个大模型判断怎么开车,然后画出来行车轨迹。
为了泛化,多了一道转化,也会导致信息量的损失。
当然,对算力、内存带宽的需求也极大增长。
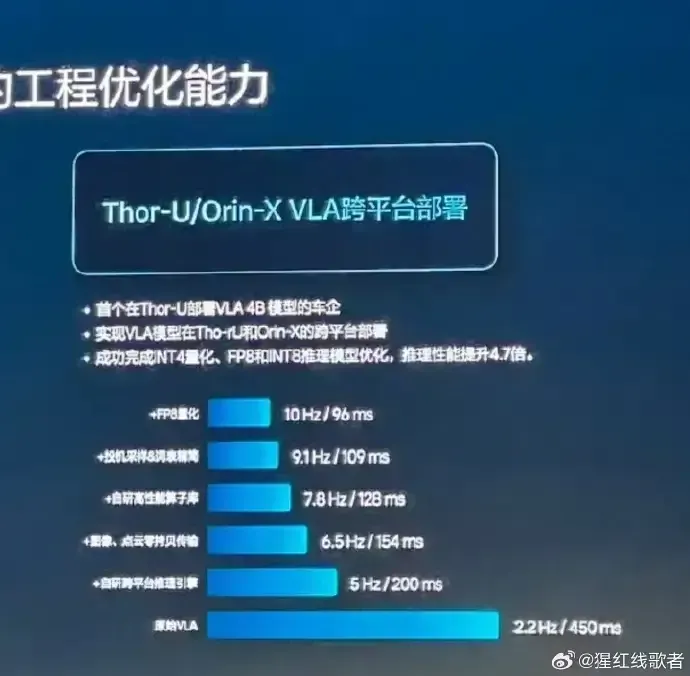
为了降低延迟,理想和小鹏都做了巨量的工程上的优化,
智驾的前沿模型还有世界模型和视频生成模型
——这不是我说的,这是王兴兴说的。
毕竟本来VLA也是之前具身智能领域拿过来的。
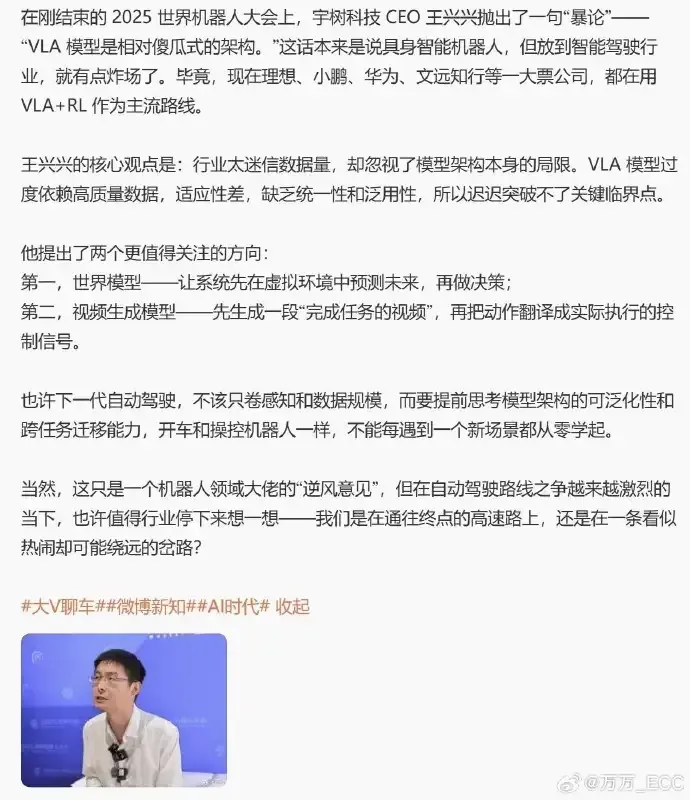
世界模型是直接通过环境信息,生成虚拟世界中对于未来的预测。
相较于VLA,世界模型少了两个步骤,即
2)把图像信息和自车信息输入大模型(也就是Prefill)3)大模型输出驾驶建议(也就是Decode)
这样,理论上不仅具备对世界环境的理解能力,也可以实现更低的延迟。
华为ADS 4.0的车端世界行为模型大体是这个意思。

大体如此吧。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 2026选购车|10万元级燃油SUV的选购价值:本田HR-V是不是“捡漏”?
- 别买Q5L了!这款豪华SUV更大更便宜,5米车长+6座,BOSE音响全系给
- 买完真想退货!这6款国产SUV劝你别碰,油耗高、毛病多,最后一款让人“当场升天”
- 豪华电动SUV新标杆?劳斯莱斯第二款纯电车型即将亮相
- 事发镇江!林肯SUV超车后又撞树!发生侧翻
- 比亚迪大唐低调亮相了 SUV新车预览
- 谁说宝马很贵?这台SUV仅23万,性价比拉满
- 父亲边打电话边带娃,女儿被电动车撞倒,母亲主动退回车主500元赔偿获点赞:“大家赚钱都不容易,主要原因是大人监护不力”
- 电动车全责!安阳交警公布2起交通事故典型案例
- 2020年现代起亚研发的电动车 “高效热泵技术”
