L2和L3自动驾驶区别在哪?车企为啥最多说L2.99999?
- 2026-05-08 18:24:33
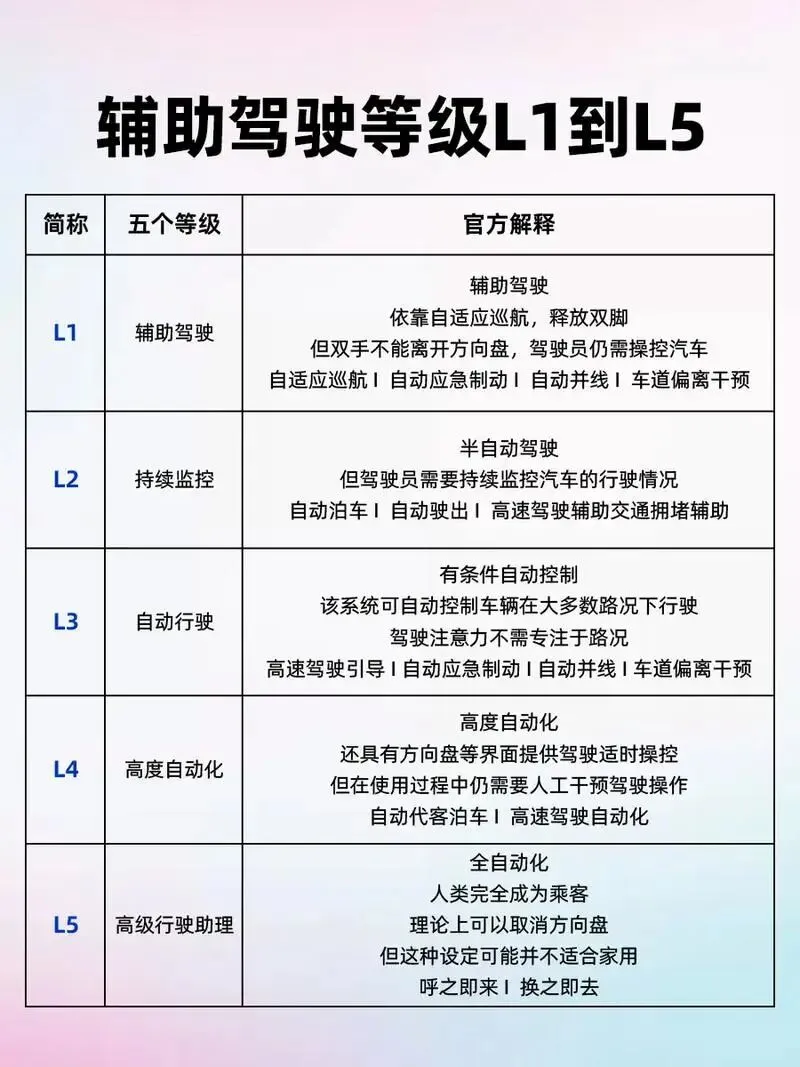
根据SAE制定的自动驾驶分级,L2与L3的本质区别在于驾驶主体与责任归属。
L2为部分驾驶辅助,执行自适应巡航、车道保持等,驾驶员必须全程监控路况、随时接管车辆。核心主体是人,系统承担辅助功能,交通事故责任由驾驶员承担。
L3为有条件自动驾驶,在限定场景内完成全部驾驶操作,驾驶员仅需按系统提示驾驶。主体变为自动驾驶系统,若因系统故障引发事故,车企及系统供应商承担主要责任。
简单来说,L2是人主导驾驶,L3是系统主导驾驶。
二、L2与L3核心技术差异
1.感知系统
L2:以摄像头、毫米波雷达为核心,部分车型加装激光雷达作为辅助,依靠深度学习完成车道与目标识别。
L3:将激光雷达列为标配,可实时生成百万点级三维点云,精准刻画周边环境。结合多颗毫米波雷达、环视摄像头构建四维冗余感知网络,即便在恶劣天气下,也能稳定识别道路、障碍物与交通标识。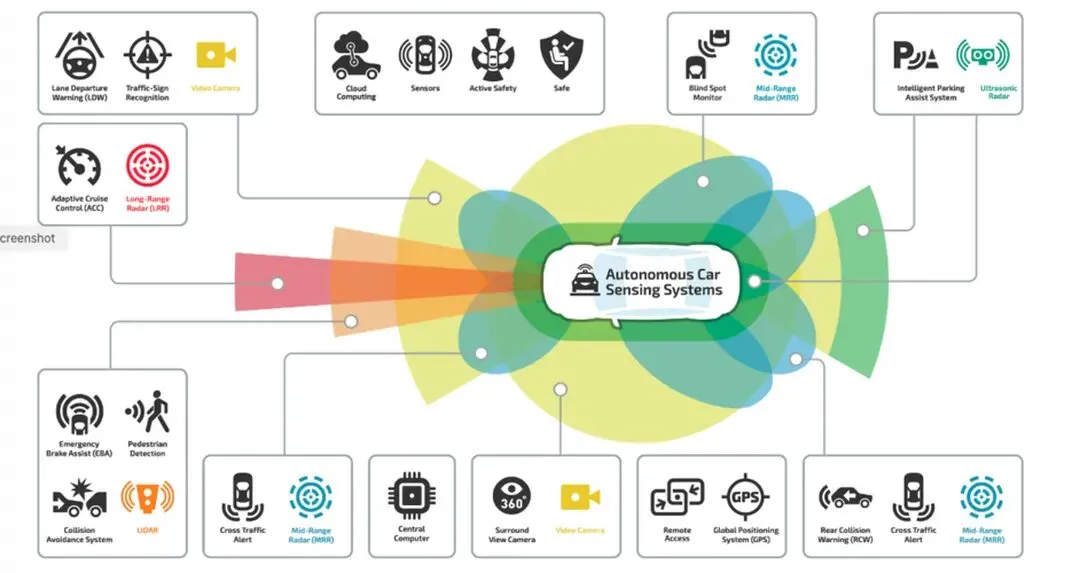
2.算力平台
L2:搭载30-200TOPS算力芯片,能满足多路传感器数据处理、基础路径规划等简单任务,算法以单路径感知决策为主。
L3:搭载200-1000+TOPS算力芯片,同步处理激光雷达点云、场景预测、多模型融合等复杂任务,完成多重安全校验,主备算力平台可无缝切换,保障系统运行稳定。
3.系统冗余与功能安全
L2:仅在传感层面配备少量冗余,制动、转向、电源等核心部件无双重备份,关键部件失效时,系统会直接退出,将控制权交还驾驶员。安全标准为ASIL-B,属于基础安全等级。
L3:采用全栈冗余设计,传感、算力、电源、制动、转向均为双路备份,满足汽车最高安全标准ASIL-D。单点部件故障时,系统可无缝切换备用模块,自动执行安全停车、驶入应急车道等操作。
4.软件控制
L2:启动、退出需驾驶员手动确认,系统持续监测驾驶员状态,手离方向盘、视线偏移会立即报警并强制退出,驾驶员需全程紧盯路况。
L3:在预设运行区域内实现闭环自动驾驶,超出场景范围时主动提醒接管;若驾驶员未及时响应,系统自动执行最小风险策略,无需驾驶员持续监控。
三、车企只敢宣传L2.9999的原因
首先,L2硬件总成本约1-3万元,符合量产与消费需求。L3激光雷达、高算力芯片、冗余硬件的成本5-10万元,整车造价大幅提高。
其次L2事故责任明确归属于驾驶员,车企没有赔偿风险。L3的责任主体转移至车企,企业不愿主动承担此类风险。

四、未来
激光雷达、高算力芯片成本肯定会逐年下降,叠加V2X车联网、高精地图的普及,L3自动驾驶的技术与成本壁垒将逐步降低。未来L3会从高端车型向中端车型下探,L2与L3功能界限会逐渐模糊。但行业分层设计的核心逻辑不会改变,安全始终是自动驾驶技术落地的首要前提。
有兴趣的可以看这篇文章,要花点小钱哦:深度研究:车载激光雷达,注定不是自动驾驶的未来
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 雷克萨斯"急了",50万级SUV,降到25.88万,2.5L混动+ 油耗5.5L
- 雷克萨斯"急了",50万级SUV,降到25.88万,2.5L混动+ 油耗5.5L
- 5-6万二手燃油SUV,别只盯着日系三杰
- 纯电SUV新品上市,410-610km续航适配多元出行场景
- 魏牌悄悄推新SUV,动力缩水却更实用,家庭用户可能真要动心了
- 现代放大招!旗舰轿车全新雅尊官图发布
- 享界S9T和轿车版,家用该怎么选
- 重磅!自动驾驶融合定位首个国家标准发布,L3+量产必备门槛终于统一(附下载)
- 东风+华为,百亿砸出一台“能进化”的SUV?奕境X9:你开三年,它比新车还聪明
- 家庭买SUV别先看配置,先看这三件事
