电动汽车如何变身移动电站?详解MATLAB双向充电仿真
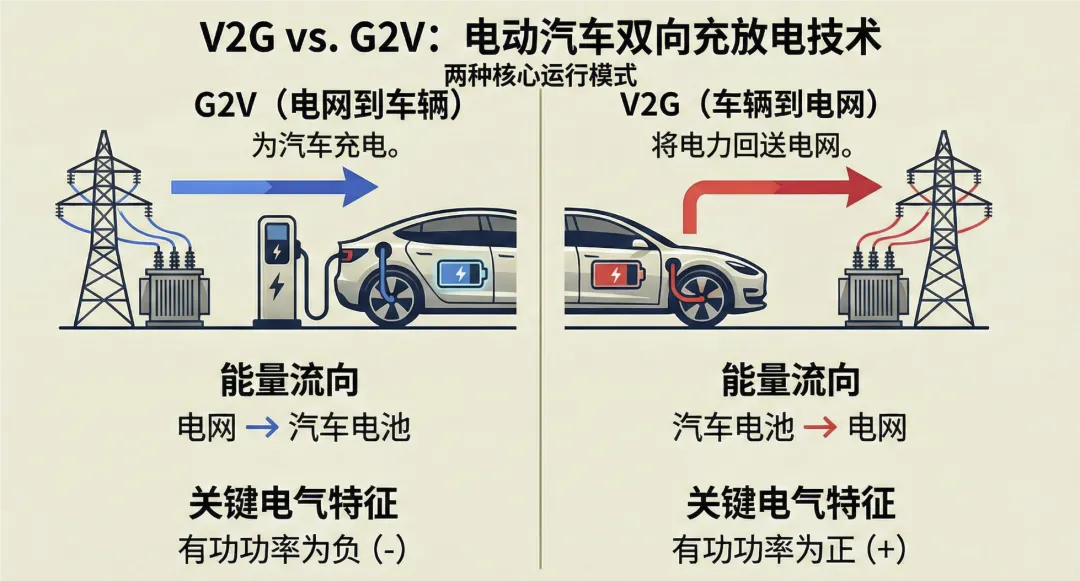
电动汽车不仅仅是交通工具,它们还可以是移动的储能单元。当我们需要给车充电时,这叫G2V(电网到车辆);当电网需要支援时,车里的电池能反向送电,这就是V2G(车辆到电网)。要实现这种灵活的能量转换,电路设计和控制策略是关键。今天我们通过一个10kW的三相电动汽车充电器模型,来看看在MATLAB中是如何实现这一过程的。
核心架构:两级变换不仅是为了稳压
这套系统的电路拓扑其实并不复杂,主要由两部分组成。
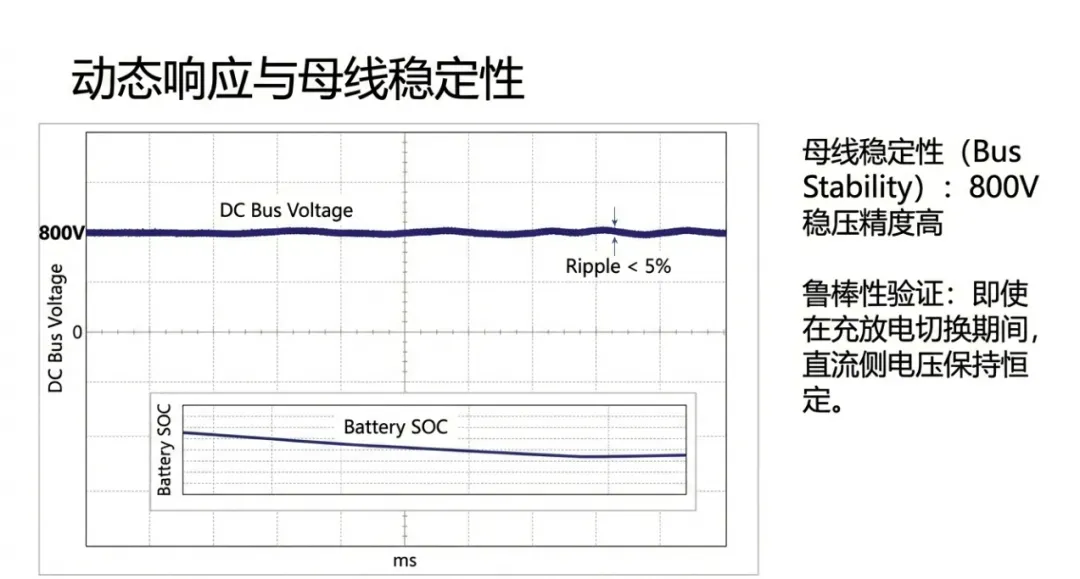
靠电网的一侧是前端转换器,也叫有源整流器。它的任务是把电网的交流电变成直流电,并且要死死咬住直流母线的电压,使其保持稳定。在这个模型中,我们将直流母线电压设定在800伏,以此作为能量传输的中间站。
紧接着是连接电池的一侧,这里使用了一个双向的Buck-Boost(降压-升压)转换器。它的作用就像一个水阀,专门用来控制电池的充放电电流。无论是要把电灌进电池,还是要从电池抽水,都靠它来调节。.
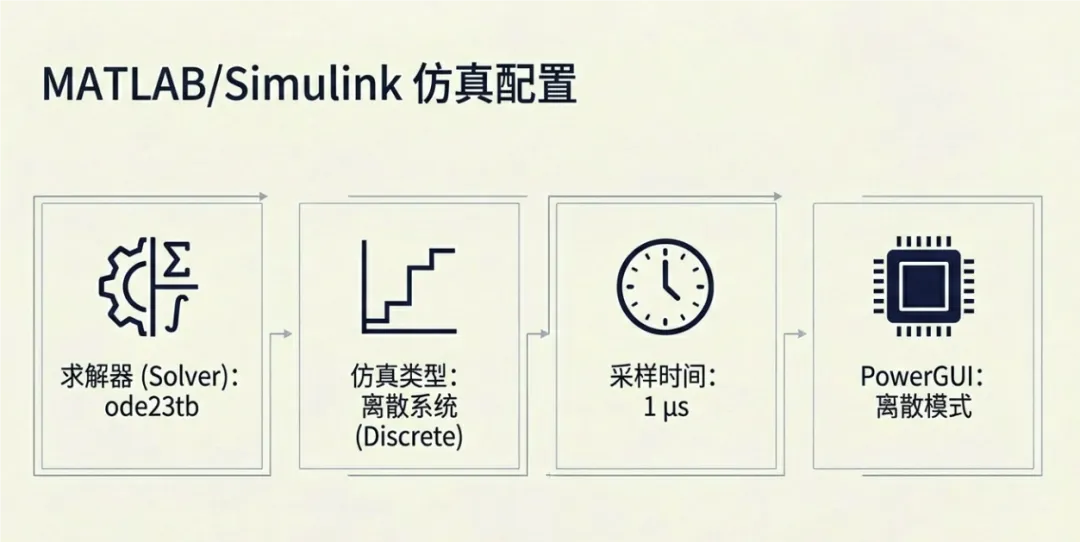
参数设定:仿真环境搭建
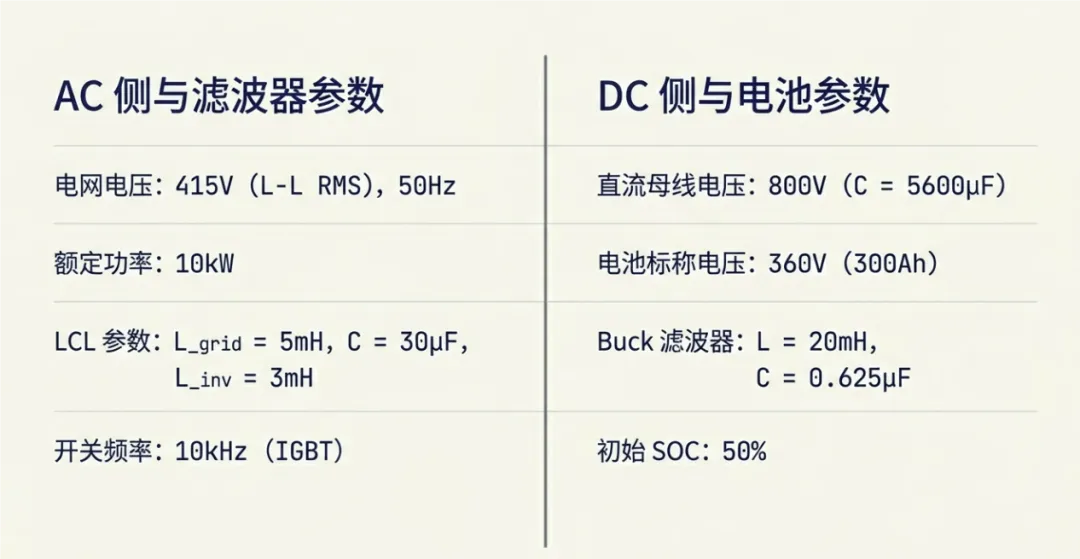
为了让仿真贴近现实,我们需要设置合理的参数。电网侧我们设定为标准的415伏线电压,频率50赫兹。为了滤除杂波,LCL滤波器的参数经过了精心挑选,电感和电容分别是3毫亨和30微法。
在这个10千瓦的系统中,功率开关器件的选择也很讲究。逆变桥部分用了IGBT,而Buck转换器部分用了MOSFET,两者的开关频率都设定在10kHz。电池组的标称电压是360伏,这意味着我们需要从800伏的母线电压降压来给它充电。
控制策略:如何让系统听话?
有了硬件,还得有大脑来指挥。在MATLAB中搭建控制模块时,我们没有直接连接,而是通过传感器来采集电压和电流信号。
对于前端整流器,我们使用了锁相环(PLL)技术。这就像是让系统听着电网的拍子跳舞,确保转换器输出的电压与电网同步。我们利用坐标变换(从abc坐标系转到dq坐标系),把复杂的交流信号变成容易控制的直流信号。
控制的核心是PI控制器(比例积分控制器)。我们设定好目标——比如直流母线要稳在800伏,或者电池电流要达到30安培。PI控制器会不断比较实际值和目标值的差距,然后调整PWM信号,驱动开关管动作。这就好比开车时踩油门,速度慢了就踩深点,快了就松一点。
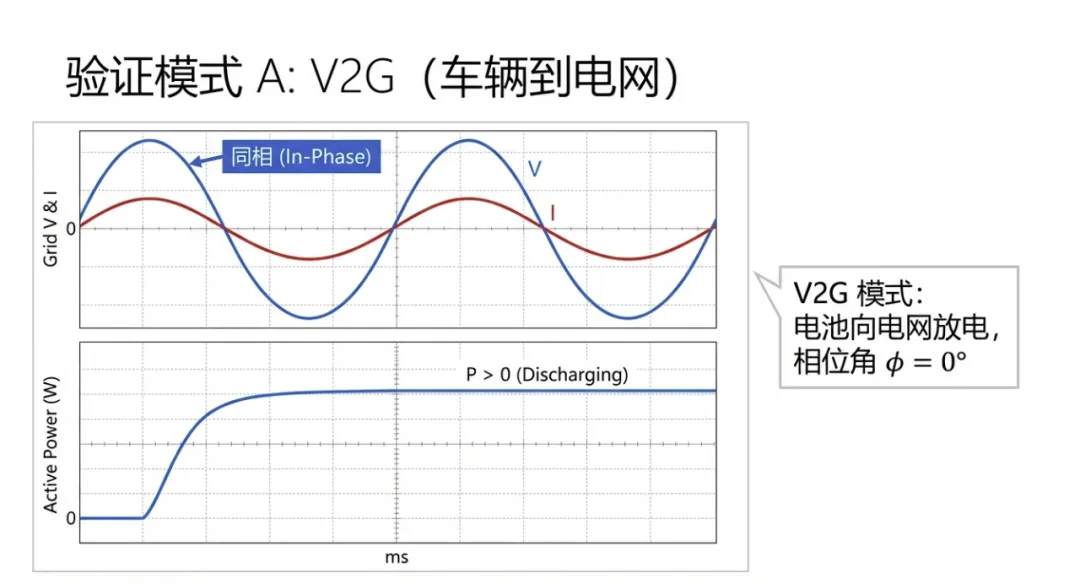
实战演练:V2G模式下的能量回馈
当我们把所有模块连接好,点击运行,会发生什么呢?
首先测试的是V2G模式,也就是电池向电网送电。在波形图上,我们观察到了一个非常典型的现象:电网电压和电流的波形是同相的,也就是说它们的步调完全一致。这在电力电子中意味着有功功率是正值,能量正在从电池流向电网。此时,我们不仅能看到直流母线电压稳定,还能看到示波器上显示的有功功率为正。
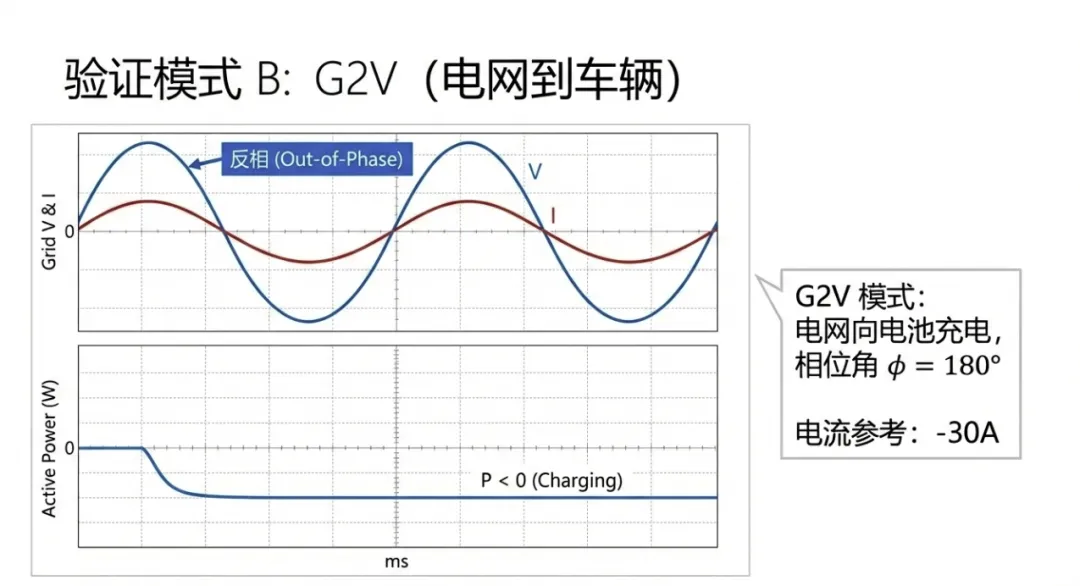
模式切换:如何实现G2V充电?
那么,如果要给车充电该怎么办?
操作非常简单,只需要改变控制指令。在仿真中,我们将电流参考值设为负数。再次运行仿真,你会发现示波器上的波形发生了戏剧性的变化:电压和电流的相位错开了,也就是出现了180度的相位差,变得反相了。
这时候再看功率读数,变成了负值。这说明能量流动的方向反转了,电网正在向电池输送能量,实现了G2V充电模式。
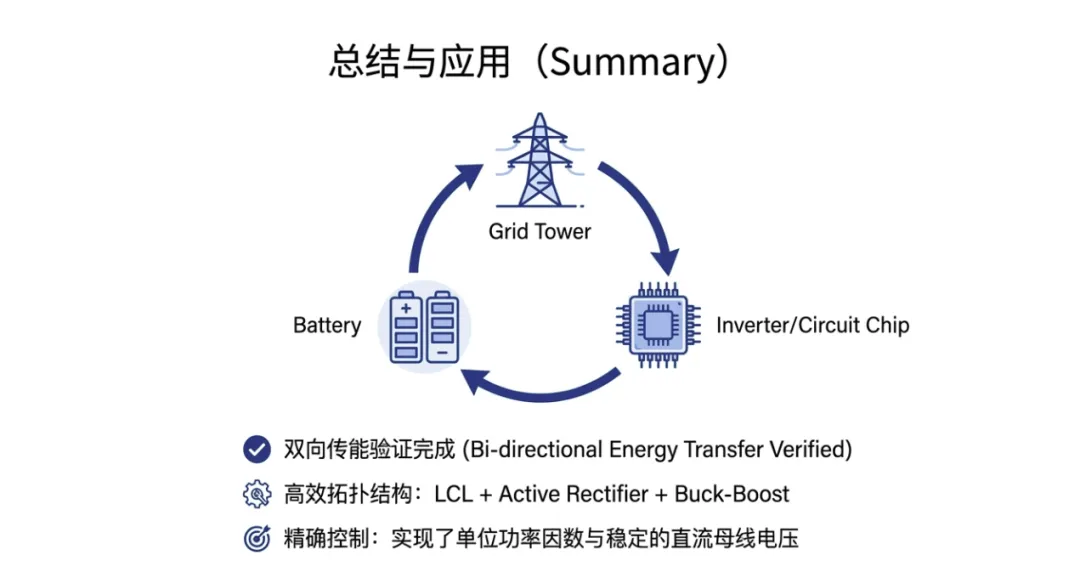
总结
通过这个MATLAB模型,我们清晰地看到了双向充电器的工作原理。从前端整流稳压,到后端电流控制,再到通过简单的电流正负指令切换充放电模式,整个过程逻辑严密。这种仿真不仅验证了理论,也让我们直观地看到了电压电流在不同模式下的相位关系,是理解电动汽车入网技术的一个极佳切入点。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
