自动驾驶算法前沿科技精简总结
日期:2026年1月27日
1. 架构范式演进:从模块化到端到端
自动驾驶算法正经历一场从传统的模块化架构向端到端(End-to-End, E2E)架构的深刻变革。传统的模块化架构将驾驶任务分解为感知、预测、规划和控制四个独立模块,而端到端架构则旨在通过一个或少数几个大型神经网络,直接从传感器输入映射到车辆控制输出。
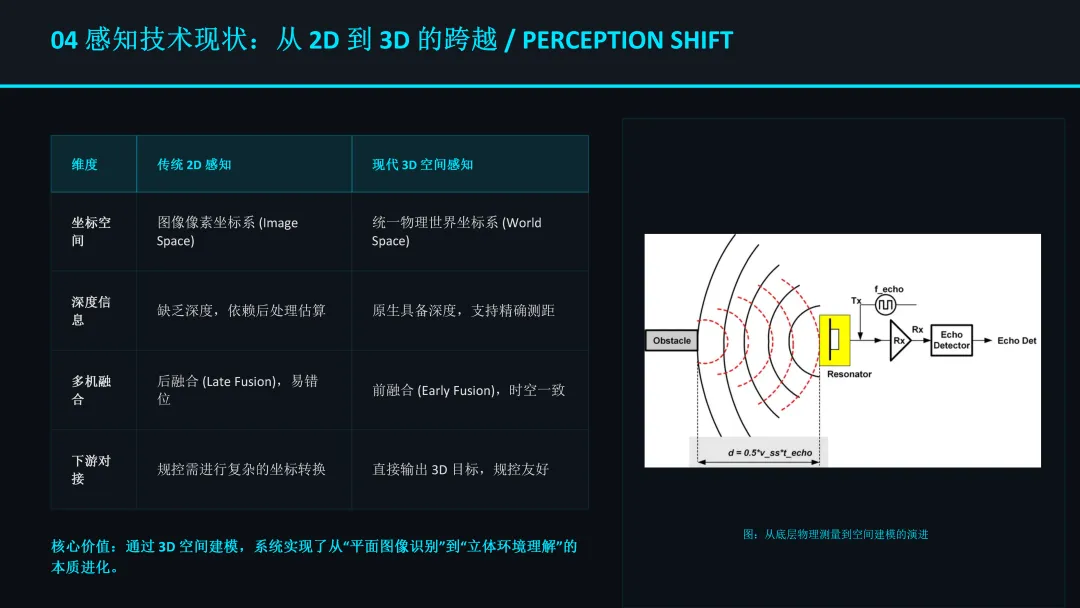
1.1 感知架构的飞跃:BEV与占用网络
当前主流的感知架构已从传统的单视角图像处理,全面转向基于BEV (Bird's Eye View) 的多传感器融合。BEV 架构通过 Transformer 模型将多路摄像头、雷达、激光雷达数据统一到鸟瞰视角下的三维空间,解决了传感器间坐标系不一致和遮挡问题。
在此基础上,占用网络(Occupancy Networks)成为感知层面的最新突破。它不再局限于检测预定义的物体类别(如车辆、行人),而是对整个三维空间进行细粒度的体素(Voxel)划分,预测每个体素的占用概率和语义信息。这使得系统能够识别和避让任意形状的通用障碍物,极大地提升了对“未知”物体的处理能力。
1.2 端到端模型的崛起
全栈端到端模型(如特斯拉FSD V12、Wayve)通过一个统一的神经网络直接输出控制指令,展现出强大的泛化能力和类人驾驶特性。这种架构的优势在于:
·信息无损传递:避免了模块间信息损失和误差累积。
·全局最优决策:模型可以学习到更复杂的驾驶策略,实现全局最优的规划。
然而,端到端模型也带来了“黑盒”难题,即缺乏可解释性,难以进行传统的故障诊断和安全验证。
2. 大模型赋能:从感知到认知
自动驾驶算法的下一个前沿是引入大语言模型(LLM)和视觉语言模型(VLM),实现从“感知”到“认知”的跨越。
2.1 认知与推理能力
VLM 能够将复杂的视觉场景与自然语言指令相结合,赋予自动驾驶系统逻辑推理和常识理解能力。例如,系统可以理解“靠边停车等待”这样的高阶指令,并结合环境信息(如路边是否有停车位、是否影响交通)做出安全决策。这对于处理长尾场景(Corner Cases)至关重要。
2.2 安全性与可解释性
为解决端到端模型的“黑盒”问题,VLM 被用于生成决策逻辑链。通过让模型用自然语言解释其驾驶行为,可以提升系统的透明度,便于安全审计和事故溯源。同时,物理规则兜底(Safety Shield)机制作为端到端模型的安全保障层,确保任何输出指令都不会违反基本的物理和交通安全准则。
3. 世界模型与数据闭环
世界模型(World Models)是利用生成式 AI 技术构建的虚拟驾驶环境,被认为是解决数据长尾问题的终极方案。
3.1 生成式 AI 仿真
世界模型(如DriveDreamer, GAIA-1)能够根据真实数据学习物理世界的动态规律,并生成无限逼真、符合物理约束的虚拟驾驶场景。这使得自动驾驶系统能够以极低的成本,在虚拟环境中对数百万种极端情况进行训练和压力测试,极大地加速了算法的迭代速度。
3.2 自动化数据引擎
支撑世界模型和端到端训练的是高效的数据引擎:
·4D 场景重建:通过多传感器融合和时序信息,将 2D 传感器数据重建为包含时间维度的高精度 4D 空间真值。
·自动化标注:利用离线大模型和感知算法,实现对海量原始数据的自动化真值标注,将数据转化为高质量的训练资产。
4. 软硬协同与安全标准
4.1 硬件加速与芯片演进
端到端大模型的部署对底层算力提出了极高要求。车载计算平台正从百TOPS 向千 TOPS 跨越,芯片架构也从通用 GPU 转向专为 Transformer 优化的 NPU(神经网络处理器)。高带宽内存(HBM)和高速车载总线成为解决数据吞吐瓶颈的关键。
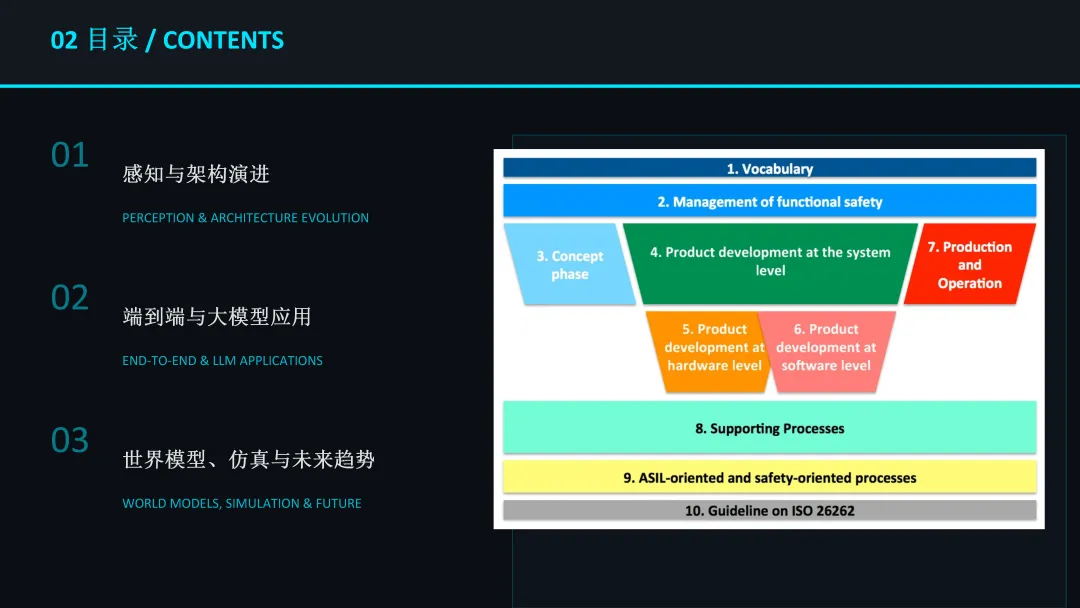
4.2 标准融合:FuSa 与 SOTIF
前沿算法的量产必须满足两大安全标准:
·ISO 26262(功能安全, FuSa):关注系统故障(如硬件损坏、软件错误)引起的风险。
·ISO 21448(预期功能安全, SOTIF):关注性能局限(如感知算法精度不足)和环境干扰(如恶劣天气)引起的风险。
协同设计是关键,即在设计之初就将功能安全和预期功能安全的需求进行统一规划和分配,构建从“防故障”到“抗干扰”的全方位安全防御体系。
5. 总结与未来展望
自动驾驶算法正处于从“工程学”向“人工智能”的转型期。端到端架构、大模型认知和世界模型仿真共同构成了下一代自动驾驶系统的核心技术栈。最终目标是迈向具备通用认知、自我进化和社交博弈能力的 AGI 驾驶员,实现真正的无人驾驶。
如需PPT 原件 扫描以下微信获取联系方式:
如需PPT 原件 扫描以下微信获取联系方式:












 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
