“标题:Decision Making for Autonomous Driving considering Interaction and Uncertain Prediction of Surrounding Vehicles作者:Constantin Hubmann, Marvin Becker, Daniel Althoff, David Lenz, Christoph Stiller会议:2017 IEEE Intelligent Vehicles Symposium (IV)

1. 摘要与核心贡献
1.1 研究问题
自动驾驶在复杂的无信号交叉口等场景下面临决策不确定性的挑战。这种不确定性主要来源于:
- 感知不确定性:传感器噪声、遮挡导致对他车状态(位置、速度)的观测不准确
- 预测不确定性:他车驾驶员意图(如直行、左转、右转)无法直接测量,是隐藏变量
1.2 核心思想
本文将上述问题建模为一个部分可观测马尔可夫决策过程(POMDP),将他车意图作为隐藏变量。其核心创新点在于设计了一个考虑交互且能预估未来信息价值的决策框架。
1.3 主要贡献
- 统一框架:提出一个在线POMDP框架,适用于任意交叉口布局和可变数量的交通参与者
- 交互式预测:他车的运动模型不仅基于自身目标,还包含了对自车行为的反应
- 信息收集策略:算法能主动规划行动(如减速观望),以在未来获得更确定的观测,从而优化长期奖励
- 在线实时求解:采用点基求解器TAPIR,在连续状态空间上实现实时求解
2. 背景与问题定义
2.1 问题场景
研究聚焦于自车沿预规划路径(如通过无信号交叉口)时的纵向速度规划(路径-速度分解)。环境中的他车有多个可能的路径意图,且其选择概率未知。
2.2 POMDP模型定义
POMDP由元组 <X, A, T, O, Z, R, b0, γ> 定义。本文中的具体建模如下:
3. 方法详述
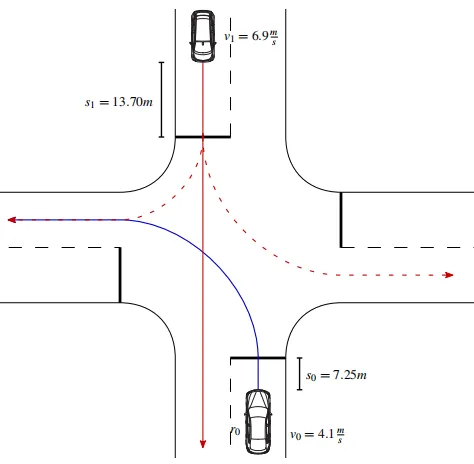
3.1 状态空间 (State Space)
状态在连续空间中定义,采用Frenet坐标系沿路径进行降维表示。
- 他车状态: (位置s, 速度v, 路径)。其中路径是隐藏变量
3.2 动作与运动模型 (Action & Motion Model)
他车加速度 的组成:
- : 交互加速度。当他车路径与自车路径相交且预计到达冲突点的时间差在
[0,3]秒内时,他车会减速()
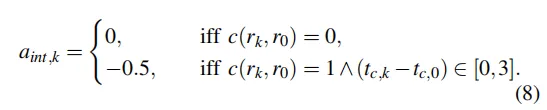
3.3 观测空间与观测模型 (Observation & Observation Model)
- 观测值:他车的全局坐标 和速度 。路径不可直接观测
- 意图预测:使用朴素贝叶斯分类器,根据他车的实时观测特征推断路径意图概率
3.4 奖励函数 (Reward Function)
奖励函数
包含多目标权衡:3.5 求解器:TAPIR
4. 实验与结果
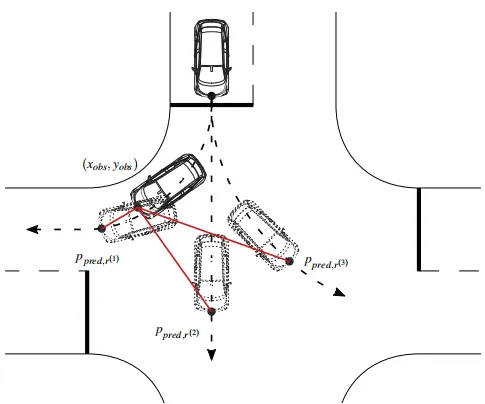
4.1 T型路口汇车场景
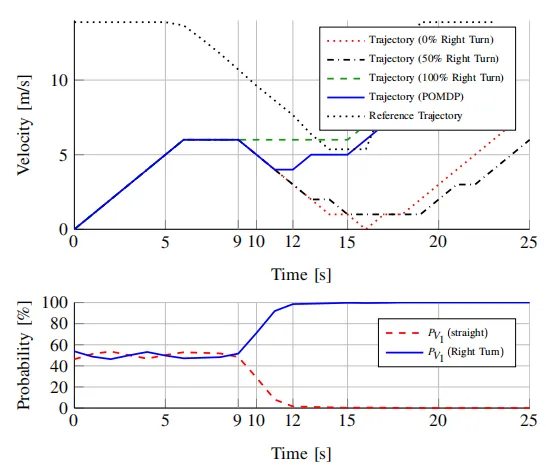
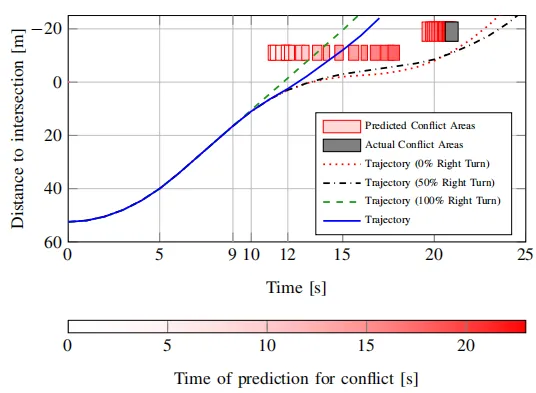
场景:自车左转,需汇入主路。主路上有两辆他车,其中Vehicle 2的意图不确定(直行或右转)。
结果分析:
- POMDP策略:自车先加速,在意图不确定时主动轻微减速(信息收集),待Vehicle 2的右转意图明确后,果断加速汇入
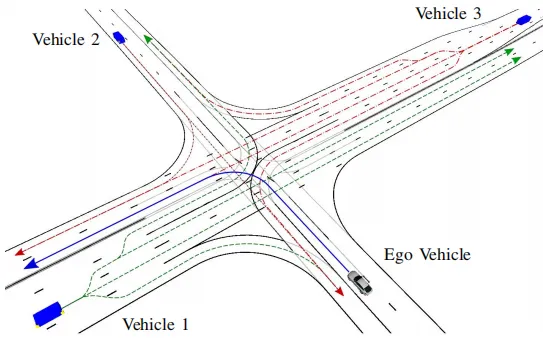
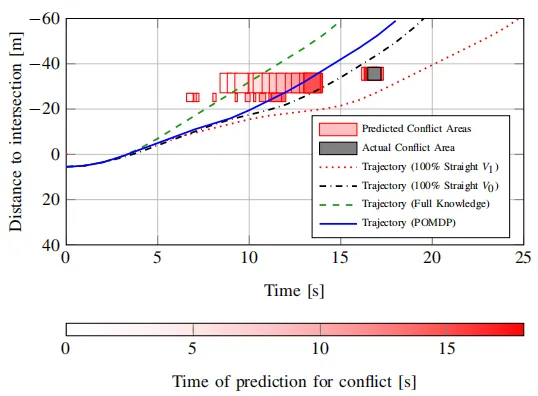
4.2 复杂交叉口场景
在具有10条可能路径、3辆他车的更复杂交叉口中,算法同样表现良好,证明了其通用性。
4.3 算法性能分析
- 计算负荷:随他车数量增加,规划视野从12s(1辆车)降至7.5s(9辆车)
5. 总结与评价
5.1 本文亮点
- 模型创新:将交互模型和未来信息收益纳入POMDP框架,实现类人"观望"策略
- 实用性:通过降维和高效求解器,使复杂理论得以实际应用
5.2 局限性与发展方向
这项工作为自动驾驶在不确定性环境下的决策提供了框架,证明了考虑预测不确定性随时间演化的特性对于生成智能、安全的驾驶行为至关重要。
关键词
自动驾驶决策POMDP不确定性预测交互模型在线求解点基求解器

