Optimizing urban road cross-section’s design to accommodate safe autonomous vehicle-cyclist interactions: A bicycle simulator study
优化城市道路横断面的设计以适应安全的自动驾驶车辆与自行车骑行者互动:一项自行车模拟器研究
作者:Amira Hammami, Attila Borsos
1.引言
随着自动驾驶车辆(AV)在城市路网中渗透率的逐步提升,其与传统自行车骑行者在共享道路环境下的交互安全成为重要问题。尤其在混合交通流中,自行车骑行者对自动驾驶车辆的行为预判与信任度还未明确。现有研究多聚焦于车辆技术或单一设施设计,缺乏在可控环境中系统评估不同道路横断面设计及自动驾驶渗透率(TPR)对骑行者心理感知的综合影响。本研究采用高保真自行车模拟器,构建包含共享车道与分离自行车道等多种断面设计的情景,结合不同TPR,通过主观量表与生理数据,系统探究骑行者对安全、舒适与压力的感知机制,以期为面向自动驾驶时代的城市道路优化与骑行者安全保障提供实证依据。
2.研究内容
本研究采用自行车模拟器进行实验,研究设计包含共享道路与分离自行车道路场景,并比较不同AV交通渗透率与车道隔离、宽度及颜色等设计特征的效果。通过累积链接混合模型(CLMM)分析参与者主观评分,以评估各因素对骑行者心理感知的影响。
3.研究方法
3.1参与者
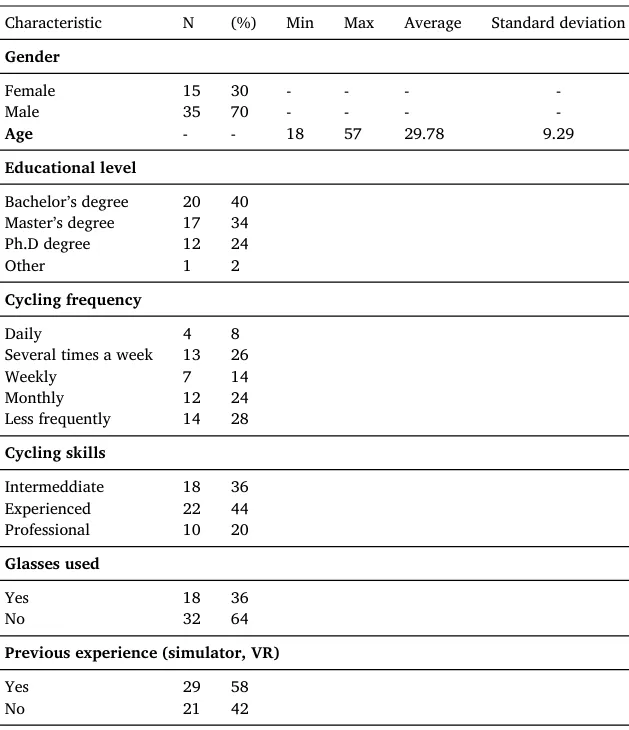
本研究共招募了52名志愿者参与自行车模拟器实验。因部分参与者数据缺失,最终纳入分析的样本包含50名参与者。所有参与者均具备骑行经验并熟悉实验所涉及的道路标识与设计。样本的详细特征见表1。
表1 参与者特征
3.2实验设计
3.2.1实验设备
本研究采用了自行车模拟器(图1),实体自行车固定在一个运动平台上,该平台提供6度的倾斜范围。自行车周围环绕三台显示器,用于呈现虚拟环境。该设置为骑行者提供了180度的视野范围,还使用了六个风扇来模拟风感,并播放交通噪声。
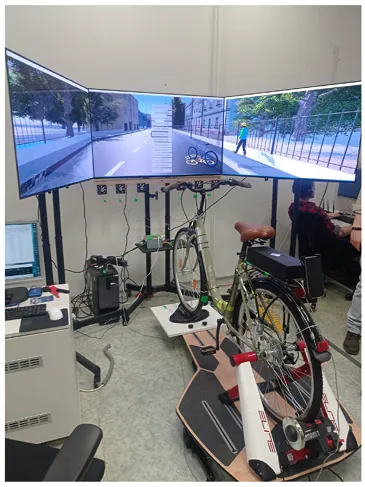
图1 自行车模拟器配置
3.2.2场景设计
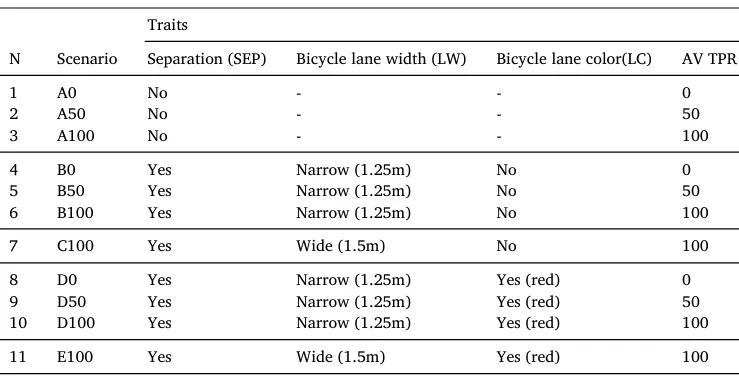
本实验在一条200米长的直线道路段进行。虚拟环境中的路线段复现了匈牙利吉厄尔市的一条共享道路,共探索了11种场景(图2)。
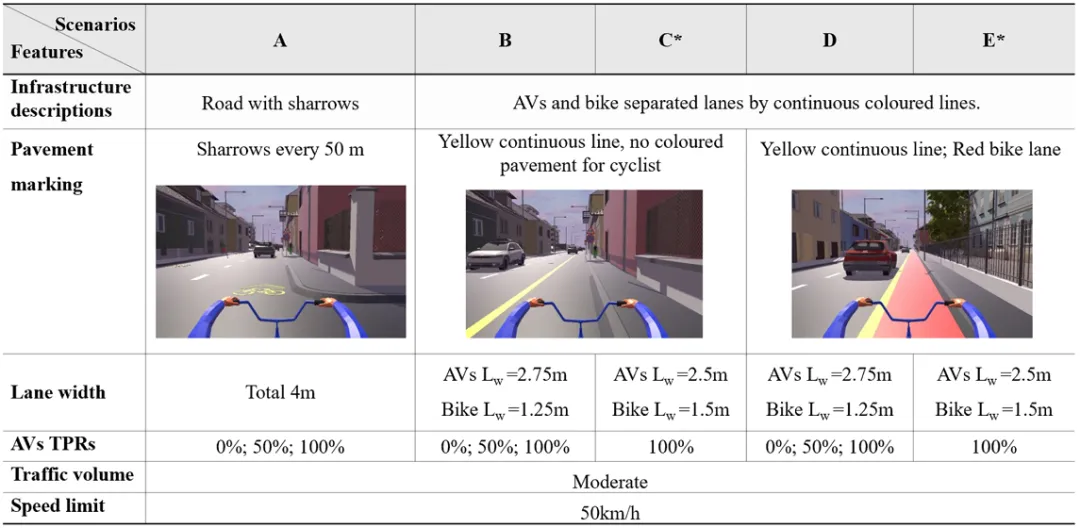
图2 场景描述
3.2.3AV交通渗透率
参与者通过交通流中自动驾驶车辆的实际占比来获取AV交通渗透率的相关信息。在一次典型的骑行过程中,骑行者平均会接触到12辆车。模拟通过分别设置0辆、6辆和12辆AV,呈现了0%、50%和100%三种AV交通渗透率。
3.2.4 AV驾驶行为
在模拟环境中,自动驾驶车辆的行为以简化方式建模。人工驾驶车辆在速度和横向运动上表现出一定的变异性,而AV则被设定以恒定的50公里/小时巡航速度行驶,且速度无波动。AV还对自行车保持更宽的检测范围(5米),并执行约1.5米的横向避让动作。
3.2.5实验流程
实验流程包含模拟前、模拟测试与模拟后三个阶段(图3)。首先研究人员介绍实验流程并为参与者提供知情同意书,随后参与者在熟悉环节掌握自行车模拟器操作,并完成模拟器晕动症问卷(SSQ)。
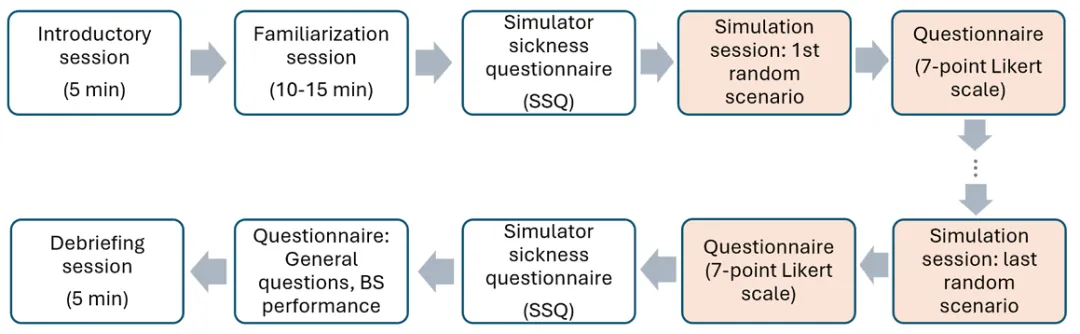
图3 实验步骤
模拟测试阶段,参与者被告知车辆类型,并通过车顶激光雷达识别自动驾驶车辆。每人完成11个随机场景,各场景结束后填写7点李克特量表问卷,并同步记录轨迹、速度、心率与注视行为。
全部场景完成后,参与者填写包含SSQ、模拟器性能评价与基本信息的问卷。
3.3数据收集
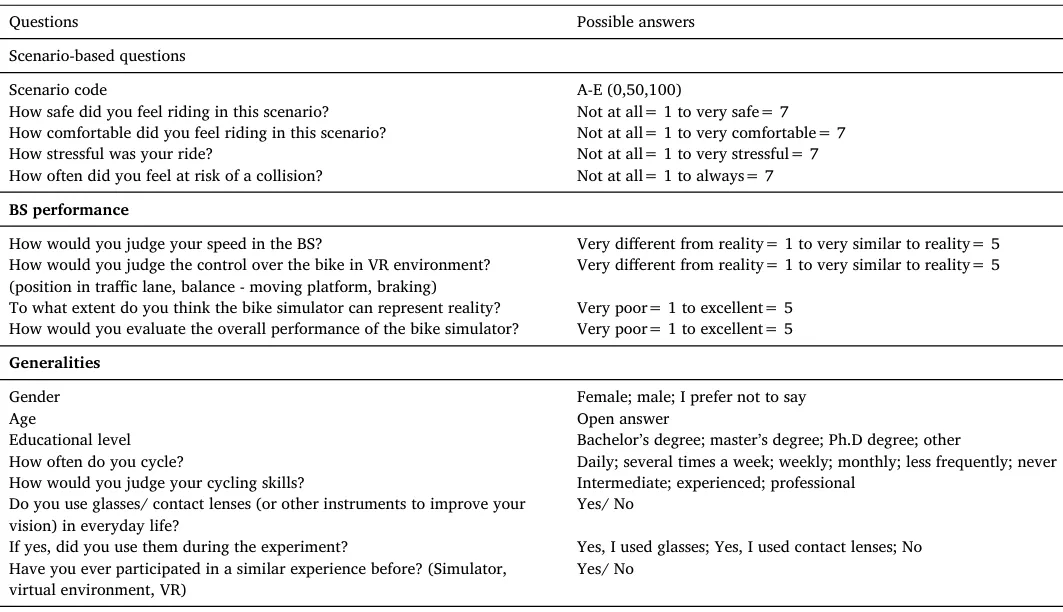
实验采用混合数据收集方法,涵盖定性与定量指标。参与者佩戴胸带式心率监测仪与眼动仪,于各场景结束后填写问卷(表2),评估安全感、舒适度及交通压力——后者特指骑行者在虚拟交通环境中与其他道路使用者互动所产生的心理应激反应,评分时要求参与者基于场景体验而非模拟器使用本身进行判断。定性数据主要为问卷回答,定量数据则包括注视行为、心率、速度及骑行轨迹。
表2 问卷
3.4数据分析
为了分析结果变量(安全性、舒适性和压力感)的序数性质,研究选择使用CLMM,该模型通过拟合R语言中的“clmm”函数进行估计。CLMM模型包含固定效应与随机效应:固定效应为场景设计特征等自变量;随机效应则以参与者ID作为聚类因子,用于控制个体内多次评分的相关性。将安全感、舒适度及压力评分分别作为因变量(表3),场景特征作为分类预测变量,鉴于各设计特征在数据中的分布不均衡,研究基于不同特征构建多个单因素CLMM,分别进行拟合分析。
表3 基于情景的自变量
4.研究结果
4.1自行车模拟器性能
根据SSQ评估,本研究使用的自行车模拟器总体不适感得分较低。此外,模拟器的主干真实感评价主要通过速度、横向位置及虚拟环境三项指标测进行评估,多数参与者认为其整体性能高于平均水平,表明该模拟器在保持较低生理负荷的同时,能提供较好的沉浸体验。
4.2感知分布
本研究通过箱线图展示骑行者对安全感、舒适度与压力感知的分布情况。在安全感方面(图4),共享道路评分最低。设有分隔的非彩色自行车道中位数稳定为6,且随TPR增加,评分略有减小,其余采用分隔设计的场景感知安全水平均较高且集中。
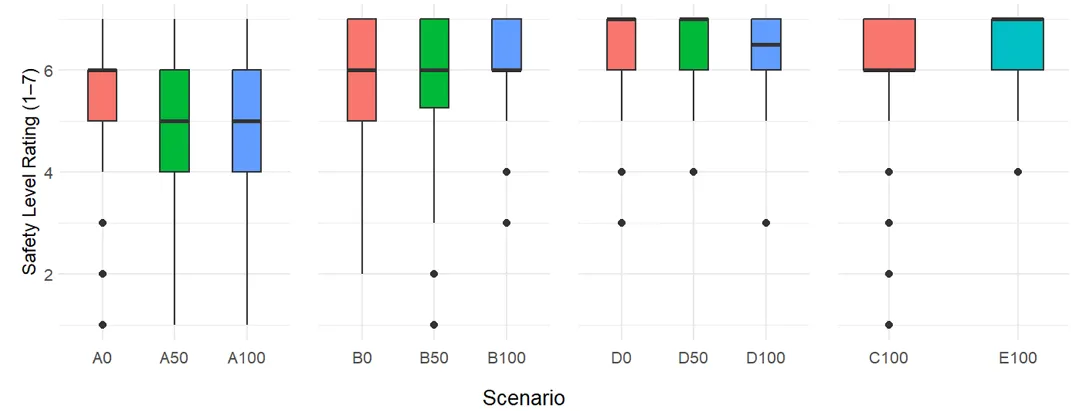
图4 安全评估在各情景中的分布图
舒适度感知分布(图5)与安全感类似。共享道路(A)评分最低且变异大;无色分隔车道(B)及着色分隔车道(D)场景中位数同为6;而E100(红色、宽车道、100% TPR)被评为最舒适的场景。
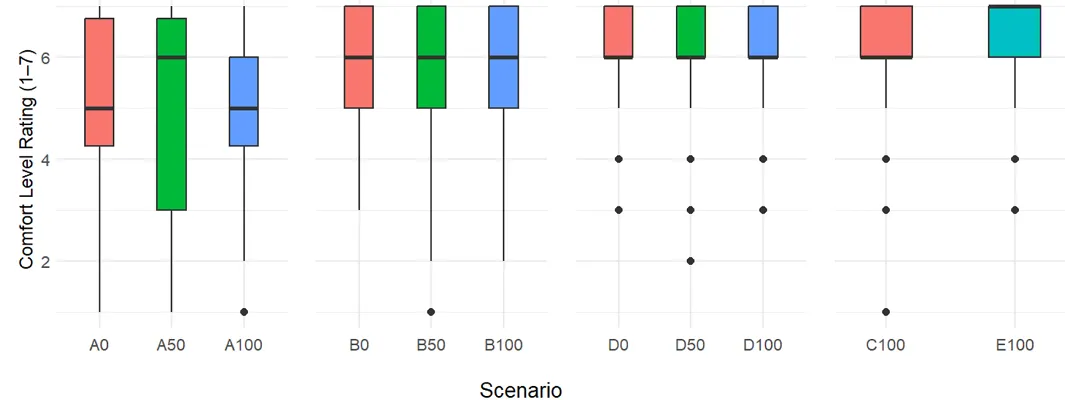
图5 不同场景下舒适度评估的分布情况图
压力感知结果(图6)呈现相反趋势。A场景压力评分显著高于各类分隔车道场景,E100压力评分最低,该结果与安全感、舒适度的积极评价相一致。
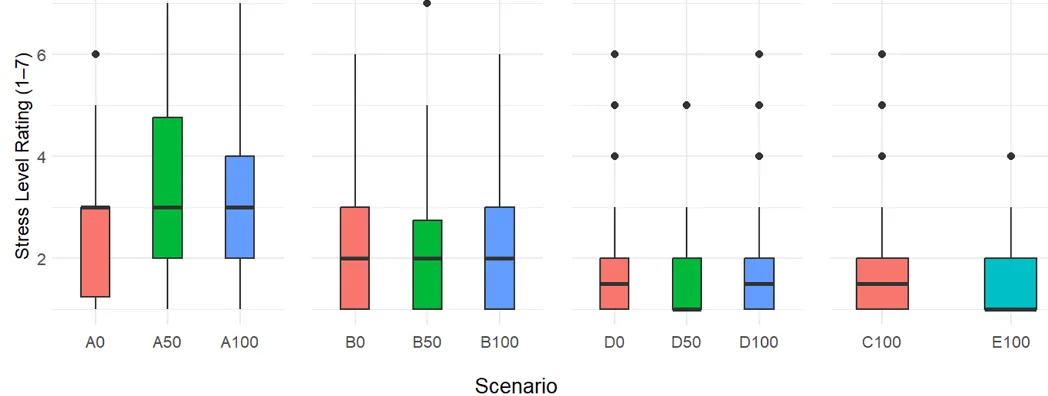
图6 压力评估在各情境中的分布图
4.3混合效应建模
本研究数据集中,TPR、车道宽度、车道颜色和车道分隔四个特征的分布不均衡,若将所有特征纳入单一模型,会导致估计偏差。为解决此问题,研究将数据划分为包含相关特征的子集,并在各子集内构建单变量模型,从而更可靠地分离并评估每个特征的独立影响。
4.3.1自动驾驶汽车交通渗透率的影响
为评估AV交通渗透率的影响,研究对共享道路(A)、无色分隔车道(B)及着色分隔车道(D)场景分别建模。结果表明(表4),在共享道路中,50%与100%的TPR均未显著改变骑行者感知安全,但二者均显著降低了舒适度,且50% TPR 还显著增加了压力感知。
表4 交通渗透率的影响结果表
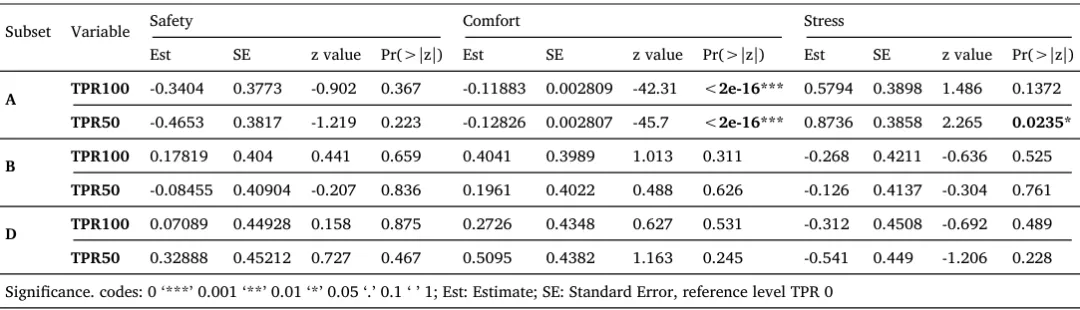
在分隔自行车道设计中,AV 的引入整体未产生显著影响。具体而言,100%TPR在 B、D 场景中均轻微提升了安全感与舒适度,并降低了压力;而50%TPR 在着色车道中改善了安全感,在无色车道中却意外降低了安全感。综上,在已实施物理分隔的设计中,AV 渗透率的变化对骑行者感知的影响不具统计显著性。
4.3.2自行车道分隔的影响
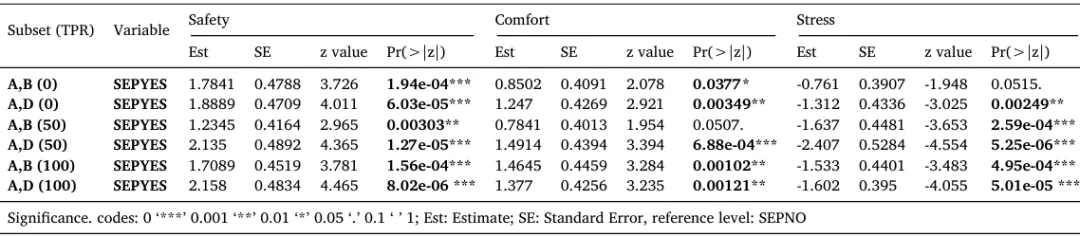
针对车道分隔的影响,本研究基于六个数据子集建立了感知模型。结果表明(表5),除个别情况外,车道分隔均显著提升了骑行者的安全感与舒适度,并显著降低了压力感。安全感提升幅度最小出现在50% TPR的B场景,最大出现在100% TPR的D场景。整体上,D场景的安全感优于B场景。舒适度提升也呈现类似模式,最小效应在50% TPR的B场景,最大在50% TPR的D场景。主观压力评分则以50% TPR下的D场景为最低。
表5 分离的影响结果表
4.3.3自行车道颜色的影响
正如预期,在设有独立自行车道的设计场景中,自行车道颜色提高了骑行者的安全感与舒适度,并降低了其压力感知(见表6)。在未引入自动驾驶车辆的场景B与D中,仅有安全感感知的改善达到显著水平。然而,在同一场景下,当AV交通渗透率达50%时,车道着色对安全感、舒适度及压力感知均产生具有统计学意义的显著影响。在较宽的自行车道场景中,车道着色对上述三项感知的影响幅度大致相同。
表6 车道着色的效果表

4.3.4自行车道宽度的影响
本研究考察了在AV交通渗透率为100%的条件下自行车道宽度的影响。在未着色的自行车道场景中,尽管增加车道宽度提高了安全感与舒适度并降低了压力感知,但这些影响均未达到统计学显著性。在着色自行车道场景中,增加车道宽度对舒适度感知产生了具有统计学意义的积极影响,CLMM的具体分析结果见表7。
表7 车道宽度的影响表

5.结论
本研究通过自行车模拟器进行实验,对自动驾驶车辆与骑行者共存的城市道路断面优化设计进行了实证探索。研究首先基于CLMM量化了不同道路设计特征及自动驾驶车辆TPR对骑行者感知安全、舒适与压力的影响。结果显示,在共享道路中引入AV并未提升安全感,反而显著降低舒适度并增加压力;而在隔离自行车道中,AV的存在会产生正向但不显著的感知影响。尽管不同设计要素的影响程度存在差异,但本研究明确揭示道路物理隔离是提升骑行者感知安全与舒适的关键因素,为未来面向自动驾驶环境的城市道路设计提供了重要依据。
6.文献出处
Hammami A, Borsos A. Optimizing urban road cross-section’s design to accommodate safe autonomous vehicle-cyclist interactions: A bicycle simulator study[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2026, 118: 103488.
7.点评
本研究采用自行车模拟器进行实验,结合主观感知量表,系统评估了自动驾驶车辆渗透率及车道设计特征对骑行者安全感、舒适度与压力感知的影响,为面向AV的道路断面优化提供了重要的心理学与行为学依据。然而,研究受限于直线路段、简化的AV行为模型及有限的渗透率梯次,且未解析各设计要素间的交互效应。未来可拓展至弯道、真实混合交通场景,并融合眼动、心率等多模态数据,进一步揭示不同要素的作用机制与贡献度,以支持更精细、更包容的城市空间设计。
注:由于水平有限,翻译中难免存在不准确或错误之处,请以原文为准,并欢迎指正。
知识搬运工(翻译者)丨 徐立丽
审核丨 赵伟翔
出品丨 合肥工业大学 运输与安全研究所
版权声明
本文为《合肥工业大学 运输与安全研究所》独家撰写,如需转载,
请注明出处,谢谢!


