今天早上,一个同事说起自己在春节期间使用自动驾驶的体验,使我了解到了很多现实的问题。
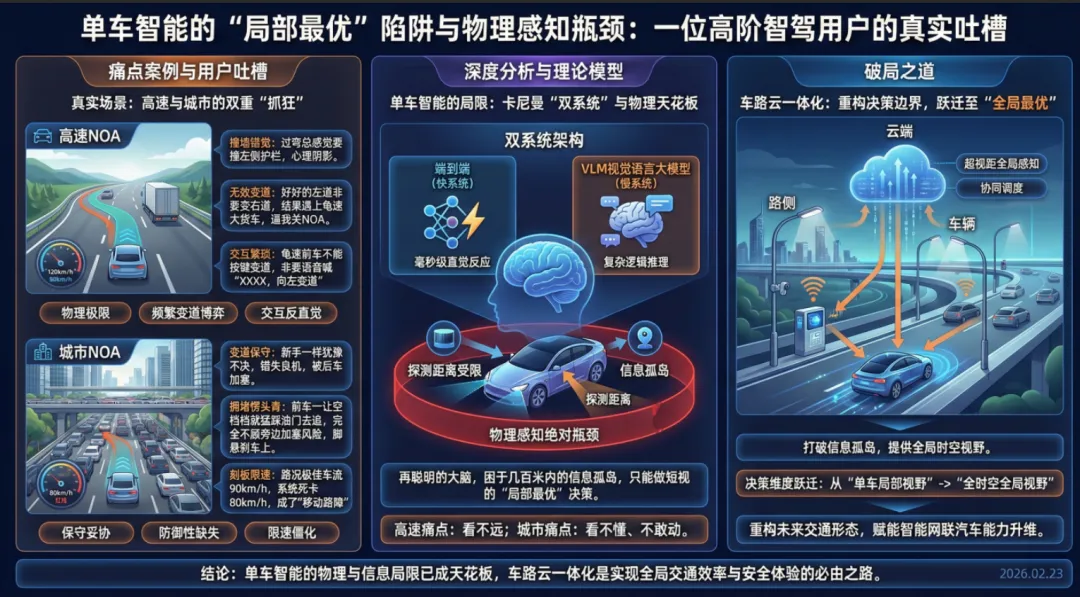
作为高阶智驾的深度用户,他坦言在高速上NOA(领航辅助驾驶)的使用率已经超过了80%,但在感受到科技红利的同时,他也常常被系统那些“反直觉”的决策气得血压飙升。比如在高速上,车辆总有一种偏左行驶的错觉,尤其过弯时总感觉要撞上左侧护栏(虽然后续OTA有所改善,但仍留下了心理阴影)。再比如,复杂的城市高架路段,这套系统变道时极其保守,像个犹豫不决的“新手”,磨磨唧唧错失良机;而在拥堵跟车时,一旦前车变道让出空档,系统又会像个愣头青一样猛踩油门去追,完全不顾及旁边车道随时可能加塞的风险,吓得他只能脚悬在刹车上随时准备接管。
最让他抓狂的,是高速上的“无效变道”和城市里的“刻板限速”。在南方常见的两车道高速上,明明左侧跟车好好的,系统一旦探测到右侧有空档,就非要自作主张变道过去。结果呢?往往是变过去才发现,几百米外有一辆80km/h的大货车。车速瞬间从120km/h骤降,不仅没变快,反而陷入了更危险的跟车博弈,逼得他只能关闭自动变道。而关了之后,遇到前车龟速,系统又不允许用方向盘按键直接拨动变道,非得扯着嗓子喊“XXXX,向左变道”,交互极其繁琐。而在路况极佳的城市封闭大道上,哪怕车流都在90km/h巡航,系统也会死死卡住80km/h的限速红线,硬生生把自己开成了“移动路障”。
听完他的吐槽,我不仅没有觉得意外,反而觉得这恰恰触及了当前自动驾驶技术演进的最核心痛点——单车智能的“局部最优”陷阱,以及物理感知的绝对瓶颈。
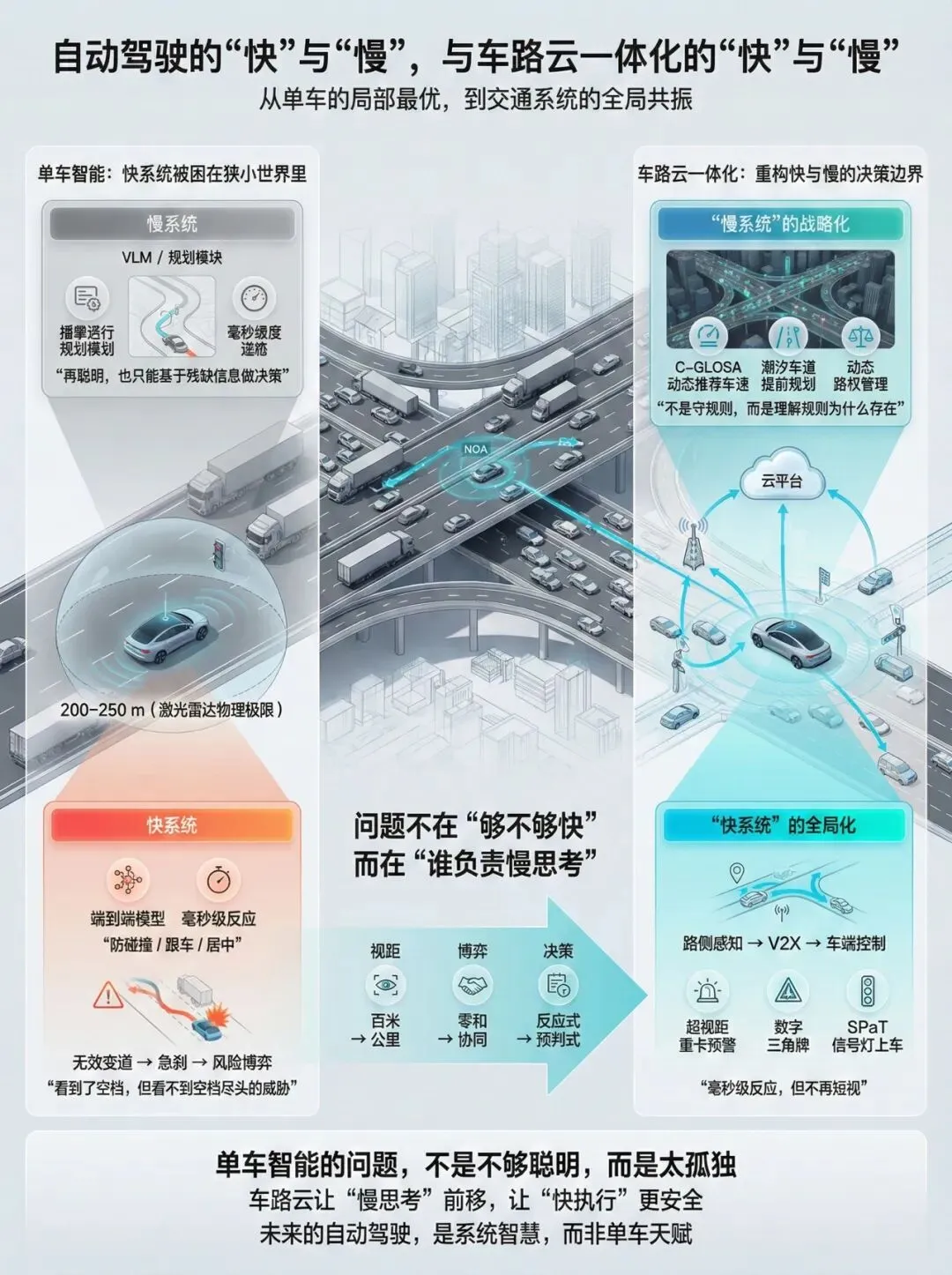
尽管单车智能在双系统架构的加持下实现了性能的飞跃,但大量真实的高频使用场景与深度用户反馈却无情地暴露出:仅依靠车辆自身的传感器硬件配置与车载算力,自动驾驶在物理定律、感知极限以及博弈逻辑面前已然触及了难以逾越的天花板。无论是高速领航辅助驾驶(高速NOA)中受限于激光雷达物理探测距离而导致的错误车道决策,还是城市领航辅助驾驶(城市NOA)中因信息孤岛效应而引发的保守博弈与机械驾驶,均表明单车智能的局部视角已经无法实现全局最优的交通效率与安全体验。由此,从单车孤立演进转向“车路云一体化”(Vehicle-Road-Cloud Integration)协同发展,将“快与慢”的决策维度从单车局部视野大幅跃迁至全时空的全局视野,已成为重构未来交通形态、赋能智能网联汽车能力升维的必由之路。
在探讨如何破局之前,我们不妨借用诺贝尔经济学奖得主丹尼尔·卡尼曼在《思考,快与慢》中提出的“双系统”认知理论来看待现在的单车智能。如今以理想为代表的头部车企,正是采用了“端到端(快系统,负责毫秒级直觉反应)+ VLM视觉语言大模型(慢系统,负责复杂逻辑推理)”的架构。但这位朋友的真实体验无情地揭示了一个真相:当这套双系统的感知视野被物理限制在几百米内,且处于信息孤岛时,再聪明的大脑也只能做出短视的决策。具体问题我总结的有以下几条:
高速NOA的感知物理极限与频繁变道的危险博弈
高速公路场景虽较城市道路去除了行人、非机动车等高度不可预测的交通参与者,呈现出相对封闭与结构化的特征,但其极高的行驶速度极大压缩了系统的容错空间。在100至120公里/小时(即约27.7至33.3米/秒)的巡航速度下,车辆对感知距离、计算延迟与决策执行的精准度要求达到了极其严苛的程度。目前,高速NOA的使用率往往超过80%,系统在应对基础的定速巡航与车道保持时表现优异,但在涉及到高维度的空间时空预测时,却暴露出严重的安全隐患与体验断层。
城市NOA的保守妥协、防御性缺失与限速僵化
如果说高速NOA的痛点源于“看不远”,那么城市NOA的痛点则源于在复杂博弈环境中的“看不懂”与“不敢动”。每天在包含高架、隧道与封闭大道的复杂通勤路线中,用户往往只敢在相对简单的路段开启NOA,这折射出单车智能在高度动态的城市非合作博弈中的深层局限。
当前的主要表现在于复杂路段变道策略的极度保守与拖沓。在当前的量产版本中,所有的NOA系统底层策略都将“绝对安全”置于最高权重。当车辆身处城市高架路的密集车流中准备变道时,由于单车无法确切得知相邻车道后方车辆的真实意图(是打算加速封堵还是减速让行),它只能将其假定为最恶劣的对抗者。这种信息不对称导致NOA的变道规划需要极其苛刻的物理安全距离冗余。结果是,在需要果断穿插的复杂路段,智驾系统的表现如同“新手”一般犹豫不决、磨磨唧唧,反复试探却不敢并线,错失了诸多稍纵即逝的变道窗口。而人类驾驶员则能够通过与相邻车辆的眼神交流、车头微调试探以及对整体车流速度的把握,简单干脆地完成博弈与并线。因此,在复杂路段,单车智能不仅未能减轻驾驶负担,反而因为其低效的通行能力被用户直接弃用。
要彻底解决这些“非老司机”的驾驶行为,我们需要将视线从一辆车,拉升到整个交通系统的维度。车路云一体化,正是通过为车辆接入超视距的全局感知与协同调度,重构了自动驾驶“快与慢”的决策边界。
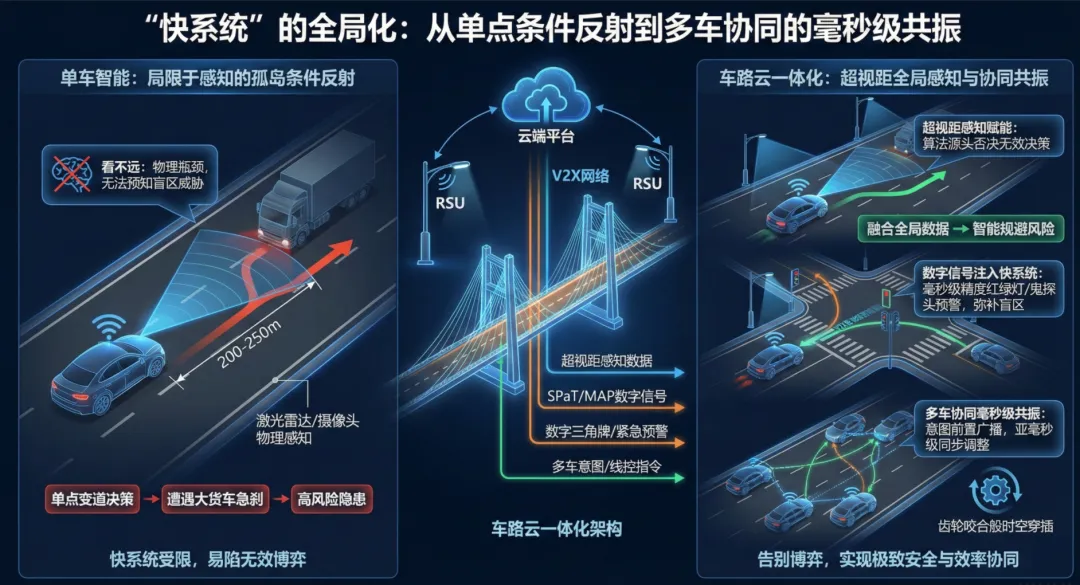
“快系统”的全局化:从单点条件反射到多车协同的毫秒级共振
单车智能的“快系统”(端到端模型)追求的是毫秒级的执行,比如防碰撞、跟车、居中。但为什么它会在高速上变道进大货车的陷阱?因为车载激光雷达的有效探测距离被物理定律死死卡在200-250米左右。它看到了右侧的空档,却看不到空档尽头的威胁。
在车路云一体化的架构下,这种“快”被赋予了超视距的全局感知能力。道路沿线部署的感知设备(RSU)犹如拥有上帝视角的千里眼,它早已将前方数公里内的重型货车位置、速度等数据,通过低时延的V2X网络广播给了后方车辆。当智能汽车在左侧车道准备变道时,这些超视距的态势数据会被深度融合进端到端模型中。系统在算法源头上就会直接否决向右变道的无效决策,从而彻底消除了“变道遭遇大车急刹”的高风险隐患。
同时,各种数字化信号的上车,让“快系统”的安全性能得到了极致跃升。传统的摄像头看红绿灯,极易被大车遮挡或受逆光干扰。而在车路协同下,交通信号机的数据(SPaT)直接转化为数字信号注入车端,车辆无需耗费庞大算力去识别图像,就能以毫秒级的精度获知灯色与倒计时。对于“鬼探头”或前方突发事故,路侧设备或前车会瞬间下发“紧急制动预警”或“数字三角牌”。这种确定性的数字契约,极大压缩了快系统的反应时间,弥补了物理雷达无法穿透障碍物的盲区。
更重要的是,车路云一体化打破了单车博弈的零和僵局,实现了多车协同调度(Cooperative Driving)。我朋友在城市拥堵路段遇到的“前车变道、本车突然后拽加速”的惊险场景,本质上是因为车辆无法预判周边车辆的意图。而在V2X网络中,前车的减速、变道意图,甚至底盘的线控指令,都会在动作发生前打包成数据帧,提前广播给侧后方车辆。后车无需等待视觉确认,就能以亚毫秒级的延迟同步调整驱动力矩。这意味着车辆不仅能告别“老奶奶式”的变道犹豫,还能在多车编队或交叉路口实现如同齿轮咬合般的时空穿插。
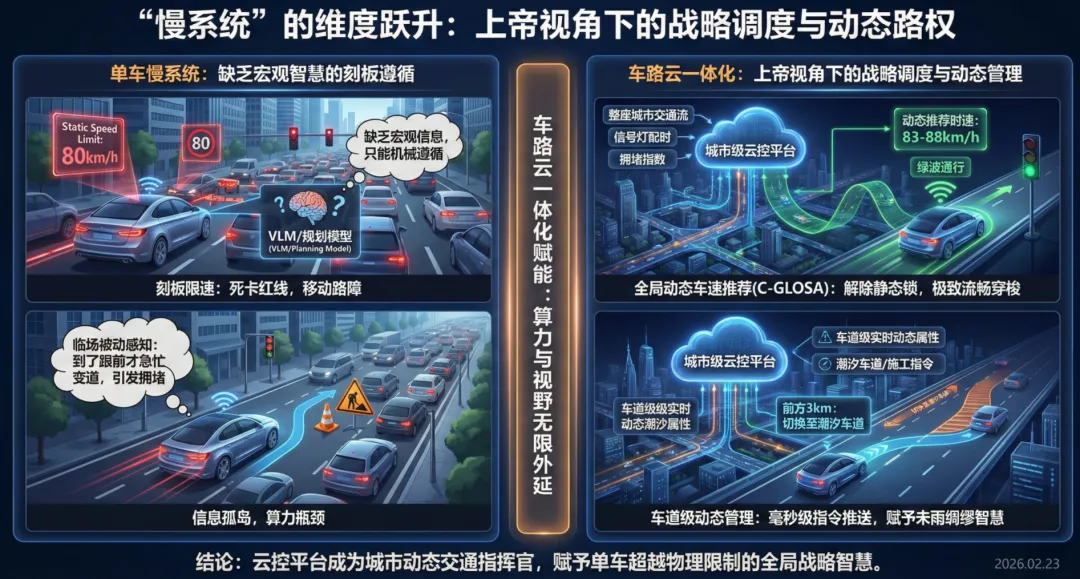
“慢系统”的维度跃升:上帝视角下的战略调度与动态路权
如果说“快系统”决定了车辆避险的底线,那么由VLM和路径规划构成的“慢系统”则决定了通行的效率上限。朋友抱怨的“刻板遵循80km/h限速”和复杂的按键/语音交互矛盾,其实都是单车“慢系统”缺乏宏观环境智慧的表现。
在车路云一体化的赋能下,“慢系统”的算力与视野被无限外延至城市级的云控平台。云端不再是静态地图的提供者,而是动态交通的指挥官。
针对刻板限速,车路云引入了全局视角下的动态车速推荐(C-GLOSA)。云控平台实时吞吐整座城市的交通流数据,掌握每一个路口的信号灯配时与拥堵指数。它会主动向车辆下发一个经过精密计算的动态推荐时速(比如建议以83-88km/h行驶以实现绿波通行)。车辆接收到这一权威建议后,会在确保安全的前提下,解除原本机械固化的静态限速锁,平滑自适应地调整车速,真正做到“一路绿灯”的流畅穿梭。
在宏观空间管理上,云端赋能了车道级的动态管理。单车的VLM模型虽然能看懂潮汐车道或施工标牌,但那是一种“临场被动感知”,往往到了跟前才急忙变道,引发后方拥堵。而云控平台掌握着路网中每一根车道的实时动态属性,当它将对向车道切换为进城潮汐车道时,这一数字指令会在毫秒内推送到几公里外车辆的“慢系统”中。车辆得以在远端就从容变道汇入最优车道,赋予了车辆“未雨绸缪”的智慧。
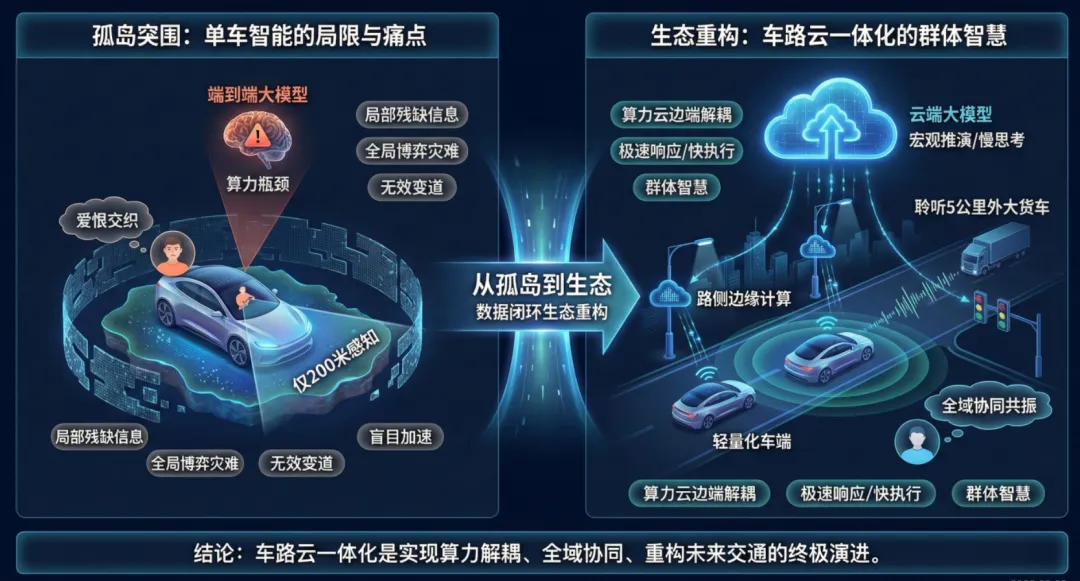
车路云一体化的目标:从孤岛突围到生态重构
我跟这位朋友说,你对城市NOA的爱与恨,恰恰是整个行业处于技术分水岭的真实写照。即便车企把单车的端到端大模型和算力压榨到极致,只要车辆依然是一座物理和信息上的“孤岛”,它就永远无法跨越基于“局部残缺信息”进行“全局博弈”所带来的灾难性缺陷。
车路云一体化,绝不是简单的在路边多装几个摄像头,或者多一个高昂的“收音机”。它是一场底层通信、算力分配与世界模型的数据闭环生态重构。它将重度依赖宏观推演的“慢思考”无缝卸载给云端与路侧边缘计算,将极速响应的“快执行”保留在轻量化的车端,实现了算力的云边端解耦。
当我们的智能汽车不再只是被动地用雷达丈量眼前那两百米的世界,而是能聆听几公里外大货车的信息,能读懂整座城市红绿灯的脉搏时,那些所谓的“新手变道”、频繁无效的危险并线,以及令人血压飙升的“盲目加速”,都将被历史淘汰。未来的交通,属于由云端大模型统筹、全域协同共振的“群体智慧”。